Beispiel: Roboter
Die Abstandregelung kann mit verschiedenen Kinematiken verwendet werden. (s.a. Kapitel „Einleitung“, Kinematik 5 bis 10, Roboter 45, Universal 91, Koppel 210, 96)
Diese Kinematiken ermöglichen eine Orientierung des Werkzeugs.
Nachfolgend wird die Abstandregelung mit einer Roboterkinematik (Kinematik ID 45) verwendet.
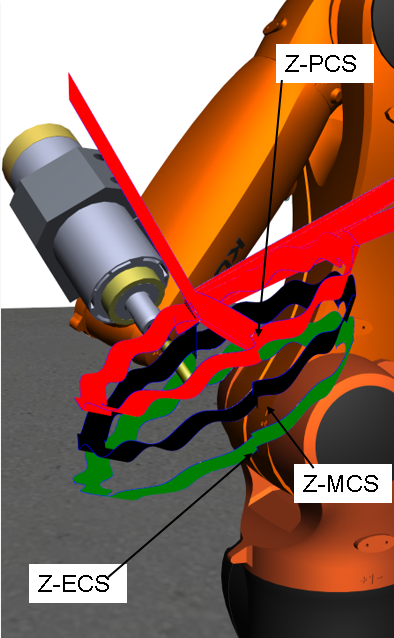
In diesem Anwendungsbeispiel wurde das Werkstück um 30° gekippt (PCS-System). Die Ausrichtung/ Programmierung des Werkzeugs wurde über die Roboterkinematik (Kin 45) durchgeführt. Die Sensorabweichung wurde über eine Sinusschwingung simuliert und ein Kreis mit Phasenanstellung des Werkzeugs gefahren. An den Quadrantenübergängen wurde eine kurze Wartezeit eingefügt, um den Effekt der Kompensation besser sehen zu können. Die unterschiedlichen Farben zeigen die verschiedenen Kompensationsausrichtrungen.