Posen der Kinematik des Sechsachs-Gelenkarmroboters
Mit Pose wird die Position und Ausrichtung des TCP bezeichnet. Die hier vorliegende Sechsachs-Gelenkarmroboter-Kinematik (KIN_TYP_45) kann eine Pose mit bis zu acht verschiedenen Gelenkkonfigurationen erreichen.
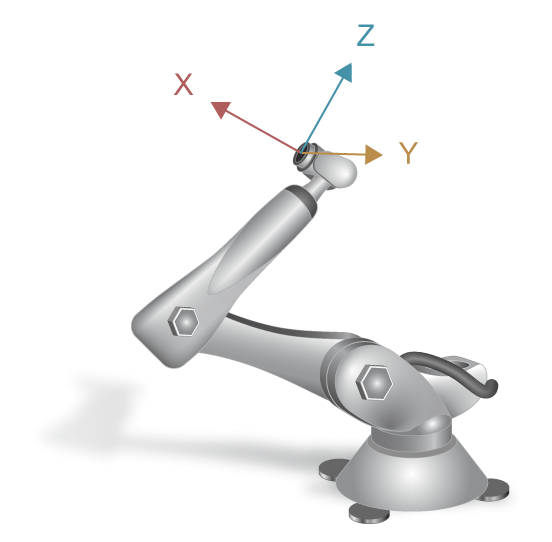
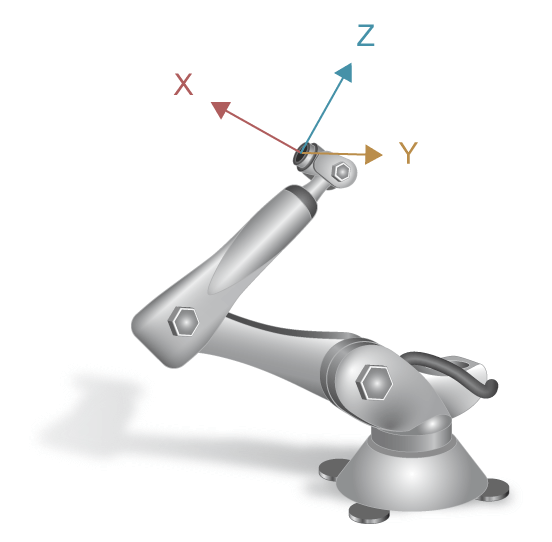
Pose 1- Status B000 |
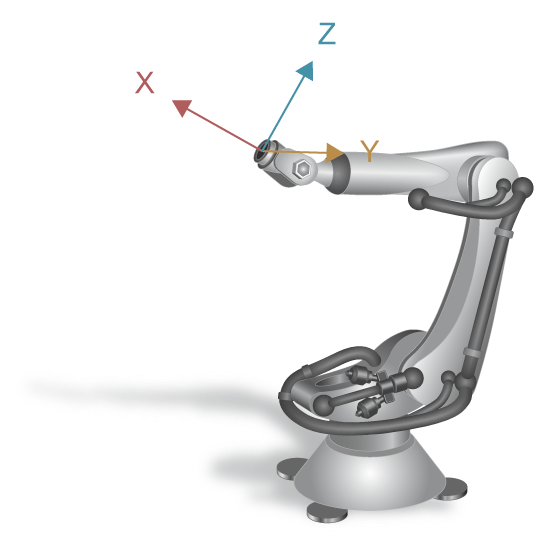
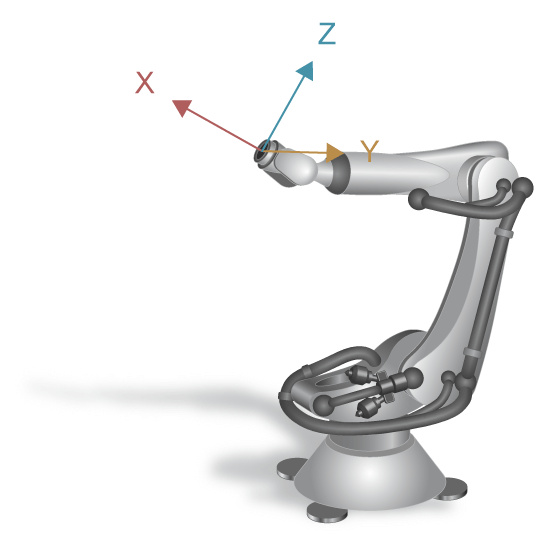
Pose 2- Status B001 |
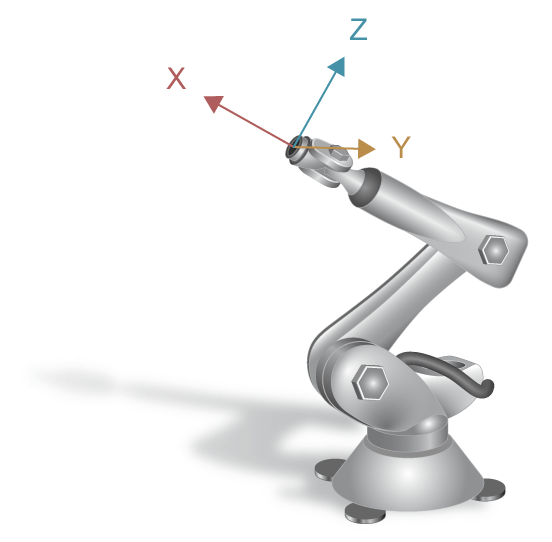
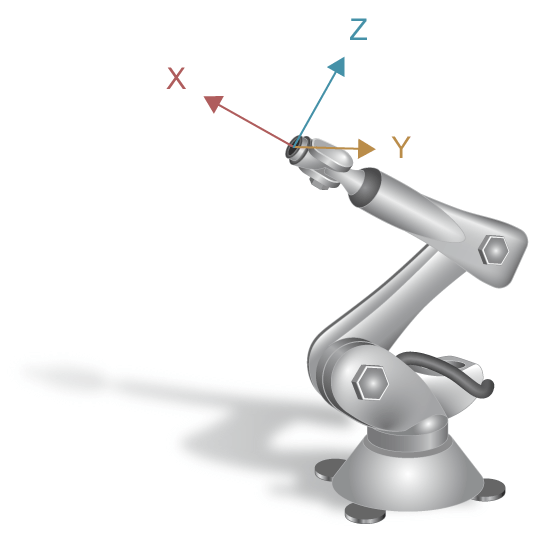
Pose 3- Status B010 |
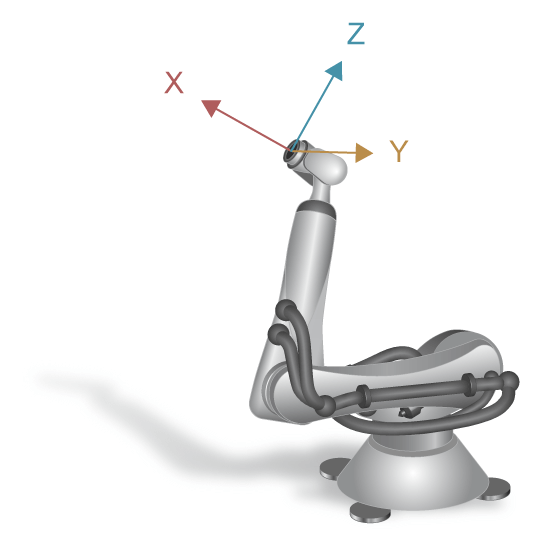
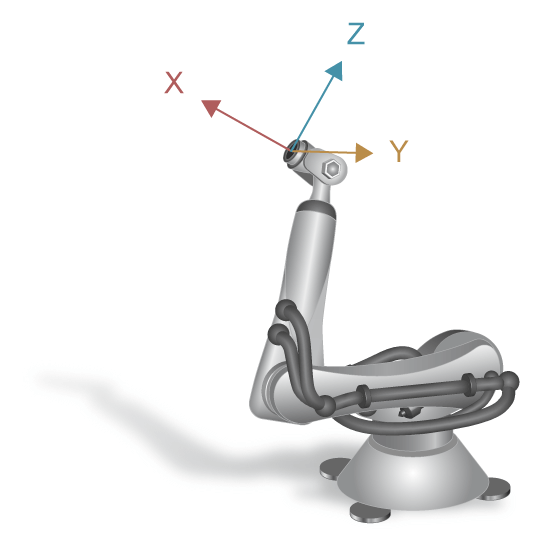
Pose 4- Status B011 |
Pose 5- Status B100 |
Pose 6- Status B101 |
Pose 7- Status B110 |
Pose 8- Status B111 |
Mit dem Posen-Status werden die möglichen Gelenkkonfigurationen identifiziert.
Hinweis

Bei aktiver Transformation kann der Roboter seinen Posenstatus nicht ändern.