Beschreibung
Für die grafische Darstellung von Maschinenbewegungen können von der Steuerung die Achspositionen bereitgestellt und mittels eines Anwenderprogramms oder in der Bedienoberfläche visualisiert werden.
In der CNC werden im Normalbetrieb Achspositionen im Interpolationstakt als Anzeigedaten bereitgestellt. Zur Vereinfachung der Visualisierung kann die Menge der bereitgestellten Daten reduziert werden, indem nur für die Visualisierung relevante Positionen ausgegeben werden, z.B. der exakte Endpunkt eines Konturelements. So bleiben Ecken auch in den reduzierten Visualisierungsdaten als Ecken erkennbar. Die korrekte Darstellung der Ecken soll insbesondere auch dann möglich sein, wenn aufgrund einer möglichst schnellen Darstellung nur sehr wenige Punkte gemeldet werden.
Unterschiedliche Betriebsmodi der Konturvisualisierung
Dry Run, Trockenlauf
Im Modus Dry Run oder Trockenlauf wird das NC-Programm normal decodiert und die Positionen werden interpoliert. Die Bewegung der Achsen wird nicht an den Lageregler weitergegeben, sodass es zu keiner Achsbewegung kommt.
Schnelle Konturvisualisierung
Die Steuerung arbeitet im Simulationsbetrieb ohne reale Achsbewegung, die Abarbeitung des CNC-Programms erfolgt im Schnelldurchlauf. Dadurch werden die programmierten Konturen gröber abgetastet, wobei jedoch Ecken erhalten bleiben.
Die Anzahl der Stützpunkte für die Visualisierung ist deutlich reduziert.
Es finden keine realen Achsbewegungen statt.
Online Konturvisualisierung
Die Steuerung arbeitet im Normalbetrieb, die Abarbeitung des CNC-Programms wird nicht beeinflusst. An der Schnittstelle der Konturvisualisierung werden Positionswerte in einem gröberen Raster zur Visualisierung bereitgestellt.
Szene
Im NC-Programm wird die sequentielle kinematische Kette definiert. An jedem Koordinatensystem der kinematischen Kette (LINKPOINT) kann ein grafisches Objekt positioniert werden. Über eine Schnittstelle wird die Bewegung jedes Koordinatensystems protokolliert. Die Bewegung des grafischen Objektes kann u.a. in kernelCAM als Spur aufgezeichnet werden.
Die folgende Tabelle stellt die Modi einander gegenüber:
Bearbeitungs-mode | Datenreduktion vor Interpolation | Datenreduktion nach Interpolation | Koordinatensystem der ausgegebenen Daten | Besonderheiten | Viewer |
1. Trockenlauf, Dry run | - keine - | - keine - | PCS | Ohne reale Achsbewegung normale Programmbearbeitung |
|
2. Schnelle Kontur-visualisierung | geometrisches Gitter, abs./rel. Sekantenfehler | Keine Datenreduktion nach Interpolation, es werden keine Stützpunkte erzeugt, die nicht auf dem Visualisierungsraster liegen. | WCS oder ACS | ohne reale Achsbewegung möglich. Schnelle Programm-abarbeitung | KernelCAM in Vorbereitung |
3. Online Kontur-visualisierung | - keine - | geometrisches Gitter, abs./rel. Sekantenfehler | WCS oder ACS |
| KernelCAM in Vorbereitung |
4. Szene | - keine - | Zeitliche Abtastung mit Bilder pro Sekunde | MCS=W0 beliebiger Punkt der kinematischen Kette, auch TCP | Für beliebige serielle Kinematiken verfügbar. Kinematische Kette muss im NC-Programm initialisiert werden | VirtuosV als vCAM |
Koordinatensysteme
Bei den einzelnen Schnittstellen zur Visualisierung stehen unterschiedliche Koordinatensysteme zur Verfügung. Folgende Definition wird hier verwendet:
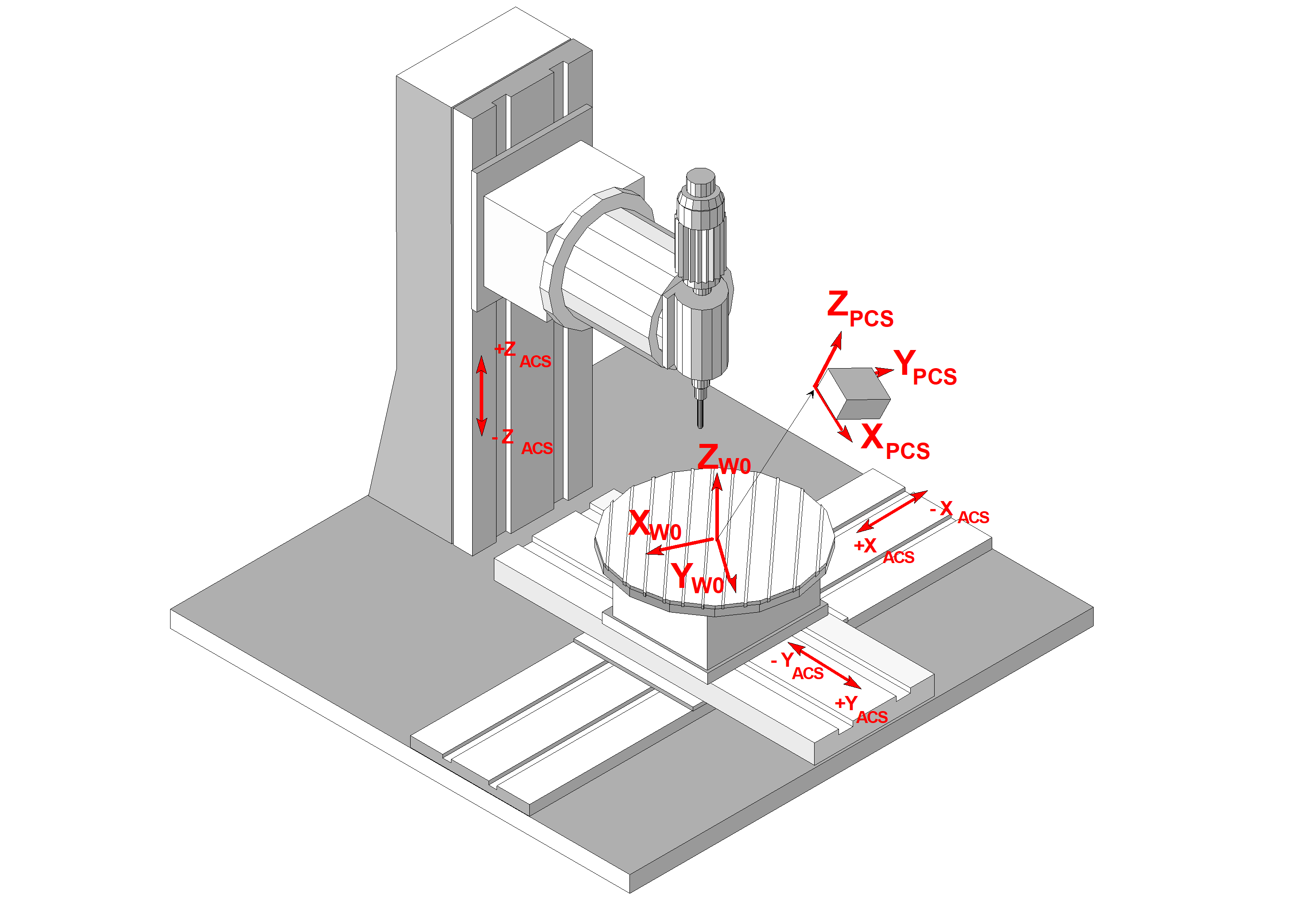
ACS: | Axis Coordinate System, Achskoordinatensystem |
W0: | Base Workpiece Coordinate System, kartesisches Grundkoordinatensystem der Maschine, bezogen auf den Werkstückspannplatz |
PCS: | Programming Coordinate System, Programmierkoordinatensystem |