CANopen
Antriebsparameter
Parametrierungen im Antrieb
Abhängig von der verwendeten Antriebshardware muss eventuell im Antrieb noch ein Digitaleingang als Latcheingang parametriert werden.
Die Vorgehensweise hierfür ist antriebs- und herstellerabhängig und muss an-hand der Antriebsdokumentation sowie eventuell unter Verwendung einer von Antriebshersteller bereitgestellten Inbetriebnahme- und Parametriersoftware durchgeführt werden.
Nachfolgend wird die Konfiguration entsprechend den in CiA DS402 bzw. IEC 61800-7-200 definierten Objektnummern beschrieben.
Parametrierung des zyklischen Telegramms
Parametrierung des Istwert-Telegramm
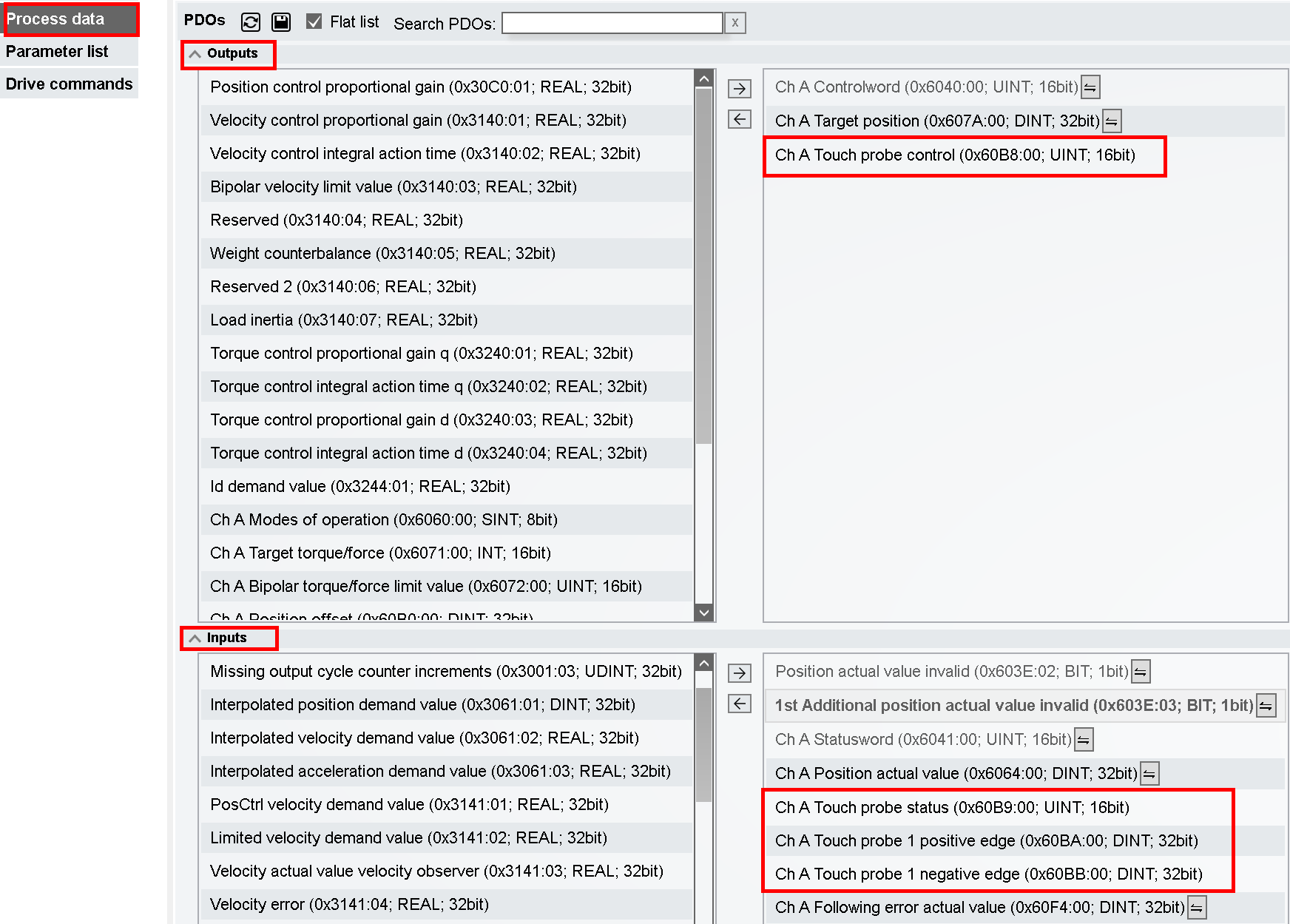
Im zyklischen Istwert-Telegramm muss bei Verwendung der Messfunktionalität ein Telegrammtyp konfiguriert werden, in dem die folgenden Daten übertragen werden:
- Latch status word (‚Touch probe status’, Objektnummer 0x60B9)
- Latch position, abhängig vom verwendeten Messeingang und der Po-larität der Flanke des Messsignals sind hier unterschiedliche Prozess-daten zu konfigurieren, siehe folgende Tabelle.
Verwendete Messhardware | Name | Objektnummer |
Messeingang 1, positive Flanke | Touch probe pos1 pos value | 0x60BA |
Messeingang 1, negative Flanke | Touch probe pos1 neg value | 0x60BB |
Messeingang 2, positive Flanke | Touch probe pos2 pos value | 0x60BC |
Messeingang 2, negative Flanke | Touch probe pos2 neg value | 0x60BD |
Falls Messungen mit unterschiedlichen Messeingängen oder unterschiedlichen Flanke gemacht werden sollen sind eventuell mehrere der oben aufgeführten Prozessdaten zu konfigurieren.
Parametrierung des Sollwert-Telegramm
Im zyklischen Sollwerttelegramm muss ein Telegrammtyp konfiguriert werden, in dem das Latch control-Wort übertagen wird.
Latch control word (Touch probe function’ Objektnummer 0x60B8
Besonderheiten bei Verwendung des Antriebsobjekts 0x60D0
Manche Antriebe bieten noch die Möglichkeit die Triggerquelle für das Latchereignis im Antrieb über das Antriebsobjekt 0x60D0 Subindex 1 bzw. 2 einzustellen. Dies bietet die Möglichkeit hersteller- bzw. antriebsspezifische Latchmethoden zu verwenden.
Die Verwendung des Antriebsobjekts 0x60D0 erfordert eine geänderte Ansteuerung des Latch-Steuerwortes und eine andere Auswertung des Latch-Statuswortes.
Um diese Sonderbehandlung zu aktivieren ist dem Achsparameter P-AXIS-00702 der Wert „DRIVE_DEFINED“ zuzuweisen.
Die Übertragung der gelatchten Werte erfolgt auch in diesem Fall über die Objekte 0x60BA … 0x60BD in den zyklischen Prozessdaten
Achsparameter
Für EtherCAT-Antriebe sind in den Achsparameterlisten die folgenden Einträge zu belegen:
- Auswahl der Flanke des Messsignals durch P-AXIS-00518
- Auswahl des am Antrieb verwendeten Messeinganges (Digitaler Eingang 1 oder 2) mittels Parameter P-AXIS-00517
- Bei Verwendung des Antriebsobjekts 0x60D0 zur Festlegung der Triggerquelle P-AXIS-00702 auf „DRIVE_DEFINED“ setzen.
(alt P-AXIS-00113) | Latchen bei positiver oder negativer Messsignalflanke:
| kenngr.measure.edge | POS / NEG |
(alt P-AXIS-00295) | Auswahl der Nummer des digitalen Messeingangs im Antrieb (1/2):
| kenngr.measure.input | 1 / 2 |
Definition der Triggerquelle im Antrieb über das Antriebsobjekt 0x60D0
| antr.canopen.probing_trigger_source | “DEFAULT” |