Transformationstypen
ID 1: e- Funktion


Beispiel:
trafo.command_pos.param[0] 10000 (h)
trafo.command_pos.param[1] 1.0 (k0)
trafo.command_pos.param[2] 2.0 (k1)
trafo.command_pos.param[3] 1.0 (k2)
trafo.command_pos.param[4] 1800000 (Normierung Motorwinkel)

ID2: Schubkurbel


Beispiel:
trafo.command_pos.param[0] 1000000 (Kurbellänge l1)
trafo.command_pos.param[1] 3000000 (Pleullänge l2)
trafo.command_pos.param[2] 0 (Exzentrizität e)
trafo.command_pos.param[3] 0 (Lösungsbereich Motorwinkel)
trafo.command_pos.param[3] 0 (Bewegungsrichtung Linearachse)

Hinweis

Bei Exzentrizität e != 0 und bestimmten Parametersätzen (z.B. (l2-l1) < e) kann es aufgrund von Verklemmungen in der kinematischen Struktur zu Einschränkungen des Motorwinkelverfahrbereichs kommen! Der Motorwinkelbereich der beiden Lösungen ist dann jeweils kleiner als 360 Grad (siehe nachfolgendes Bild).

ID3: Exzenter



Beispiel:
trafo.command_pos.param[0] 1000000 (Exzenterradius R)
trafo.command_pos.param[1] 0 (Offset Nullstellung Linearachse)
trafo.command_pos.param[2] 0 (Offset Nullstellung Rotatorachse)
trafo.command_pos.param[3] 0 (Lösungsbereich Winkel)
ID4: Kurbel mit Anlenkung durch Linearachse

Beispiel:
trafo.command_pos.param[0] 1000000 (Abstand la- Gelenkpunkt)
trafo.command_pos.param[1] 1410000 (Abstand lb- Gelenkpunkt )
trafo.command_pos.param[2] 1000000 (Kurbellänge lh)
trafo.command_pos.param[3] 0 (Offset für Nullstellung)
trafo.command_pos.param[4] 0 (Drehrichtung -Drehachse)

In Nullstellung der Kinematik (β=0) liefert die Abbildung für ls die Antriebsposition 0. Wenn notwendig, kann über param[3] ein Offset zu dieser Position eingestellt werden. (Beispiel: Antriebsposition bei β=0 ist 50mm -> der Offsetwert ist auf 50mm einzustellen). Die Default-Drehrichtung der Achse B ist mathematisch positiv, diese kann über den Parameter trafo.command_pos.param[4] angepasst werden, siehe nachfolgende Abbildung.

ID5: Winkel-Kinematik
Verfügbar ab CNC-Version V3.1.3107.41/ V4.3.0.
Durch die Winkelbewegung erfolgt eine Linearbewegung.
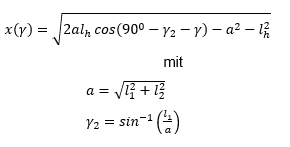
Über die Parameter werden die Längen l1,l2 und lh vorgegeben. Die maximale Auslenkungen werden über die Parameter γmax und γmin festgelegt.

Beispiel:
trafo.command_pos.param[0] 1900000 (Länge der Strecke l1)
trafo.command_pos.param[1] 600000 (Länge der Strecke l2)
trafo.command_pos.param[2] 4428300 (Länge der Strecke lh)
trafo.command_pos.param[3] -450000 (Untergrenze Winkelauslenkung γmin)
trafo.command_pos.param[4] 450000 (Obergrenze Winkelauslenkung γmax)
trafo.command_pos.param[5] 0/3400000 (Positionsoffset)
trafo.command_pos.param[6] 0 (Winkeloffset)
trafo.command_pos.param[7] 0 (Winkelinvertierung)
trafo.command_pos.param[8] 0 (Invertierung der Linearposition)
Nachfolgend die Übertragungsfunktion mit und ohne Positionsoffset
Rot: ohne Positionsoffset
Hellblau: mit Positionsoffset
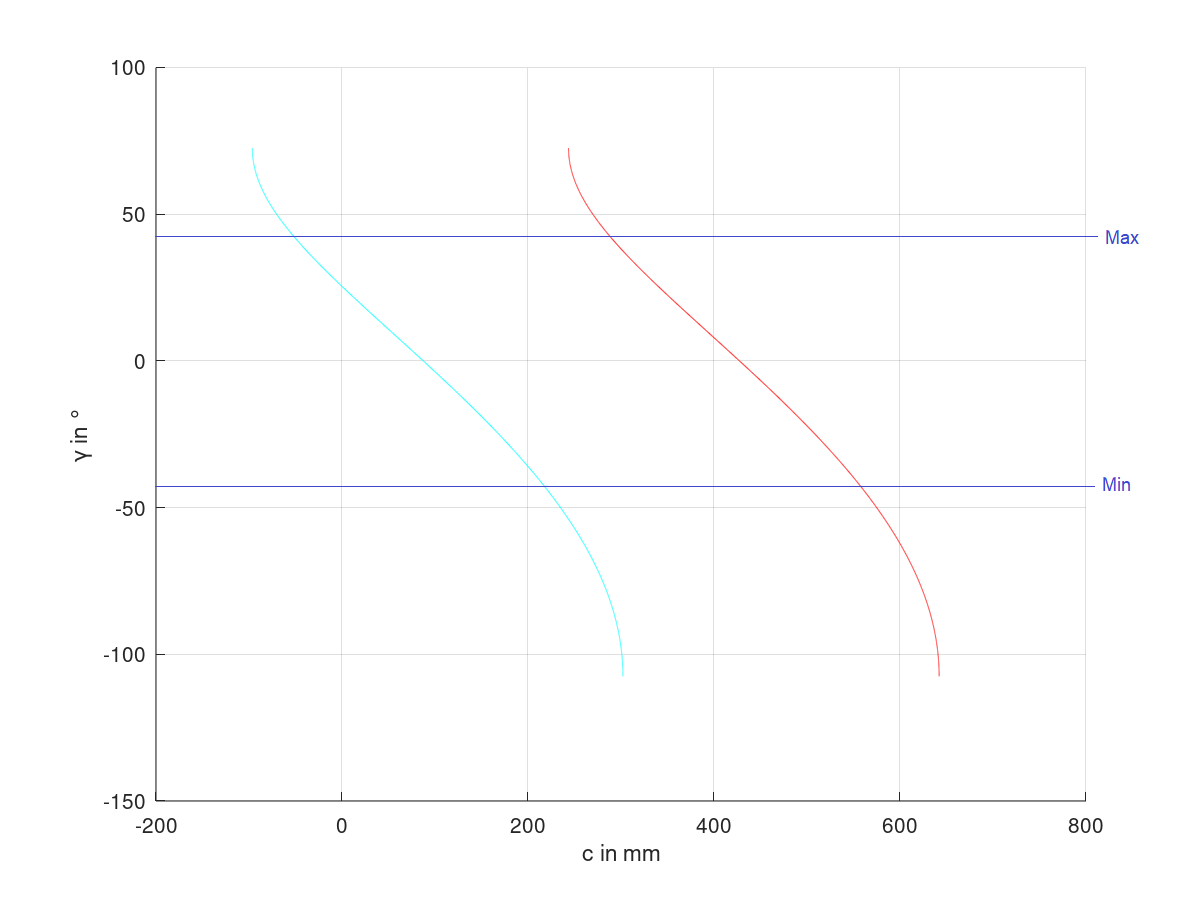
Winkeloffset und Winkelinvertierung
Ergänzend zum obigen Beispiel kann der Winkel über Parameter mit einem Winkeloffset versehen und auch invertiert werden.
trafo.command_pos.param[0] 1900000 (Länge der Strecke l1)
trafo.command_pos.param[1] 600000 (Länge der Strecke l2)
trafo.command_pos.param[2] 4428300 (Länge der Strecke lh)
trafo.command_pos.param[3] -450000 (Untergrenze Winkelauslenkung γmin)
trafo.command_pos.param[4] 450000 (Obergrenze Winkelauslenkung γmax)
trafo.command_pos.param[5] 3400000 (Positionsoffset)
trafo.command_pos.param[6] 250000 (Winkeloffset)
trafo.command_pos.param[7] 0/1 (Winkelinvertierung)
trafo.command_pos.param[8] 0 (Invertierung der Linearposition)
Die nachfolgende Übertragungsfunktion ist mit und ohne Winkelinvertierung.
Rot: ohne Winkelinvertierung
Hellblau: mit Winkelinvertierung
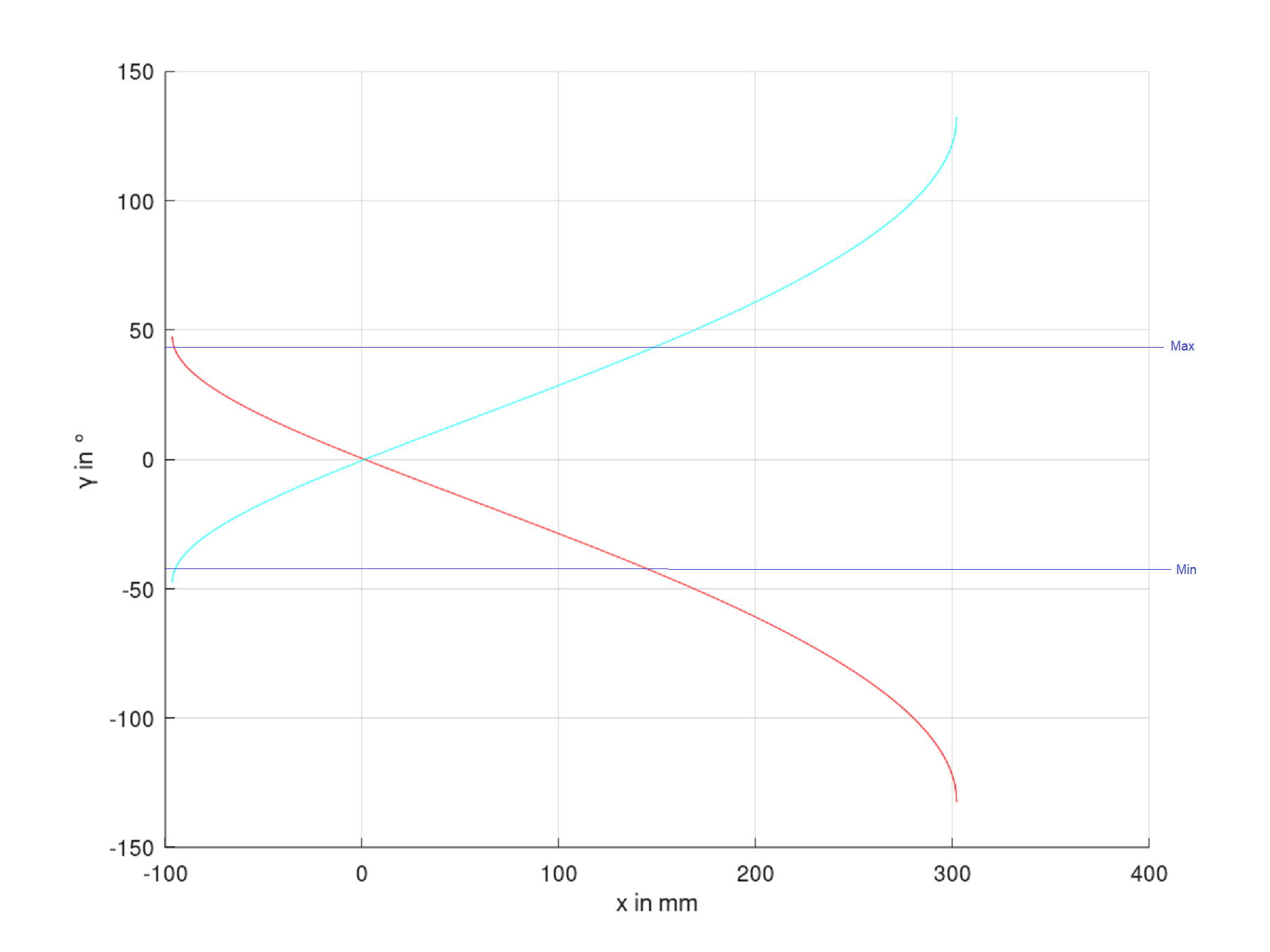
Invertierung der Linearposition
Ausgehend vom obigen Beispiel kann die Linearposition invertiert werden.
trafo.command_pos.param[0] 1900000 (Länge der Strecke l1)
trafo.command_pos.param[1] 600000 (Länge der Strecke l2)
trafo.command_pos.param[2] 4428300 (Länge der Strecke lh)
trafo.command_pos.param[3] -450000 (Untergrenze Winkelauslenkung γmin)
trafo.command_pos.param[4] 450000 (Obergrenze Winkelauslenkung γmax)
trafo.command_pos.param[5] 3400000 (Positionsoffset)
trafo.command_pos.param[6] 250000 (Winkeloffset)
trafo.command_pos.param[7] 0 (Winkelinvertierung)
trafo.command_pos.param[8] 0/1 (Invertierung der Linearposition)
Die nachfolgende Übertragungsfunktion ist mit und ohne Invertierung der Linearposition.
Rot: ohne Invertierung der Linearposition
Hellblau: mit Invertierung der Linearposition
Generell gilt:
Der vorgegebene Winkel der Kinematik hat, bedingt durch die vorgegebenen Eingangsgrößen, mathematische Grenzen. Werden diese nicht eingehalten, wird der Fehler ID 70342 ausgegeben.
ID 6: Symmetrische Schubkurbel
Diese Struktur hat neben identischen Längen von Kurbel und Pleuel eine zusätzliche mechanische Kopplung zwischen diesen Elementen, sodass es in der Mittelstellung des Schiebers (Linearposition) zu keiner mechanischen Verklemmung kommen kann.
Symmetrische Schubkurbel-Lösungsbereich 0 bis 180 Grad:
|
|
|
|




Symmetrische Schubkurbel-Lösungsbereich 180 bis 360 Grad:
|
|
|
|




Beispiel:
trafo.command_pos.param[0] 1500000 (Pleuellänge == Kurbellänge)
trafo.command_pos.param[1] 0 (Offset Linearposition )
trafo.command_pos.param[2] 0 (Offset Winkelposition )
trafo.command_pos.param[3] 0 (Lösungsbereich - Winkel)
Übertragungsfunktion φ= f(x)
