Glättung der Sensorwerte
Die Geberwerte sind unter Umständen verrauscht. Dies kann dazu führen, dass die Abstandsregelung das System mit Schwingungen anregt. Filter können helfen, das Eingangssignal zu glätten und die Performance der Abstandsregelung zu verbessern.
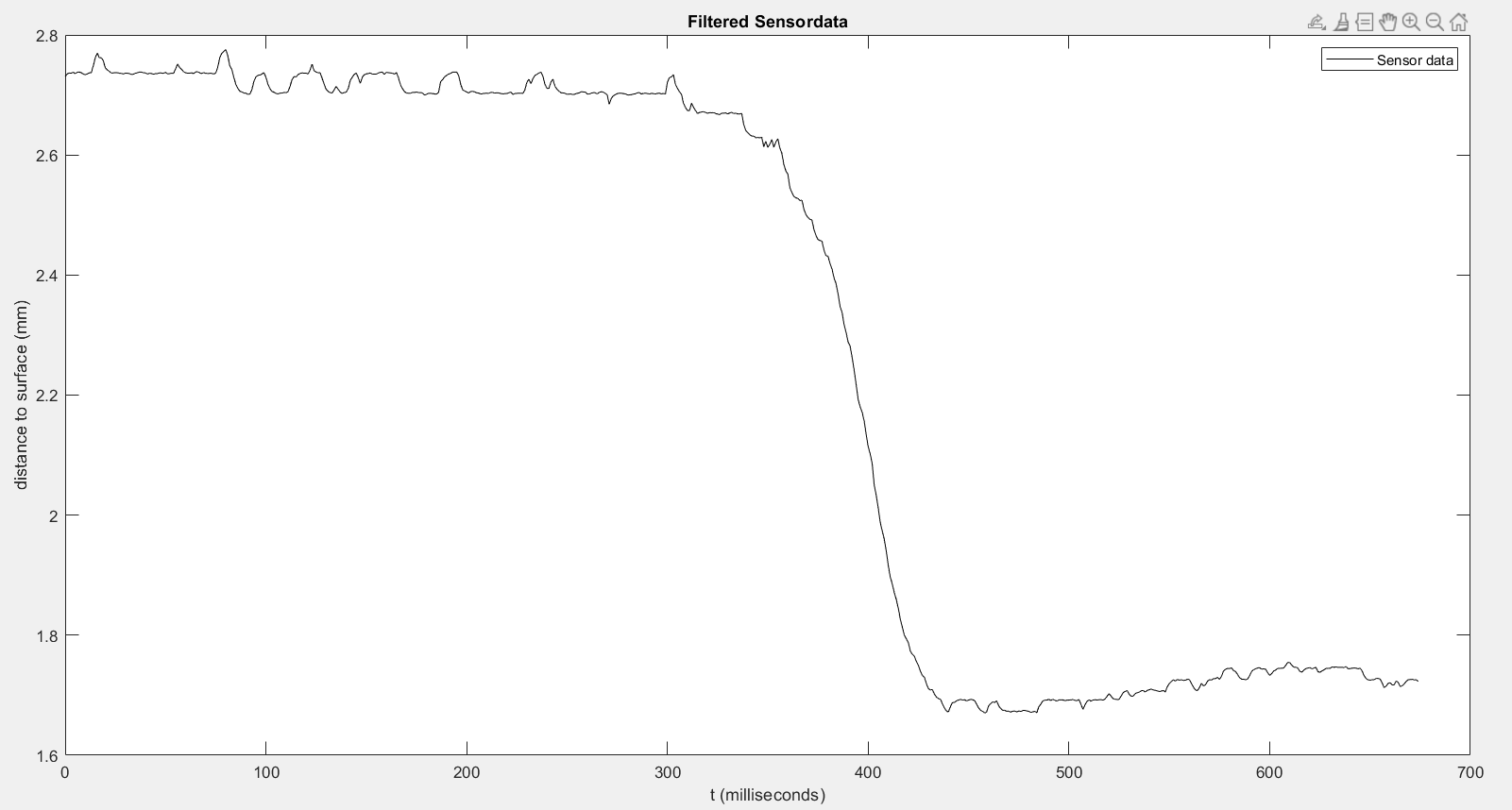
In den folgenden Kapiteln ist die Wirkung der Filter, sowie der Einfluss der einzelnen Parameter auf die Filterwirkung anhand des gleichen Versuchs beschrieben. Für den Versuch wurde ein Millimeter hohes Hindernis in einer Höhe von ca. 2,8mm mit einem Sensor überfahren. Die Abstandsregelung ist für diesen Versuch deaktiviert um die Wirkung der Filter ohne Rückkopplung der Abstandsregelung veranschaulichen zu können.

Nachfolgende Abbildung zeigt die aufgenommenen, ungefilterten Sensordaten.
Bei der Auswahl eines geeigneten Filters muss berücksichtigt werden, dass Filter eine Totzeit in das System bringen. Für die Abstandsregelung bedeutet das eine langsamere Reaktion auf Änderungen des Abstandes. Bei der Konfiguration des Filters muss dem entsprechend ein Kompromiss zwischen Filterwirkung und Filterverzögerung gefunden werden.
Ziel der Filterparametrierung ist eine möglichst gute Glättung der Messwerte beim Fahren auf der glatten Ebene und gleichzeitig eine möglichst geringe Verzögerung beim Reagieren auf das Hindernis.
Hinweis

Um die Performance der Abstandsregelung zu optimieren, kann zusammen mit der Konfiguration eines passenden Filters auch der PID-Regler entsprechend nachgezogen werden.
WARNUNG

Bei der Parametrierung der Filter ist zu beachten, dass eine aktivierte Abstandsregelung automatisch eine Rückkopplung auf den Filter verursacht. Dies kann zu unerwünschtem Verhalten der Abstandsregelung bis hin zum Aufschwingen der Achse führen.