Type 2: Linear Method
Description
The linear method is selected by setting the parameter P-AXIS-00172 to the value 2. It is based on the theoretical position lag at constant axis velocity.
In this case, position lag is calculated as follows:
|
|
|

In addition, the theoretical position lag can be weighted with a factor dependent on P-AXIS-00167 and this is defined as follows:
|
|
|

The permitted position lag is calculated as follows:

|
|
|
|
|
|
|
|
|
 :
: :
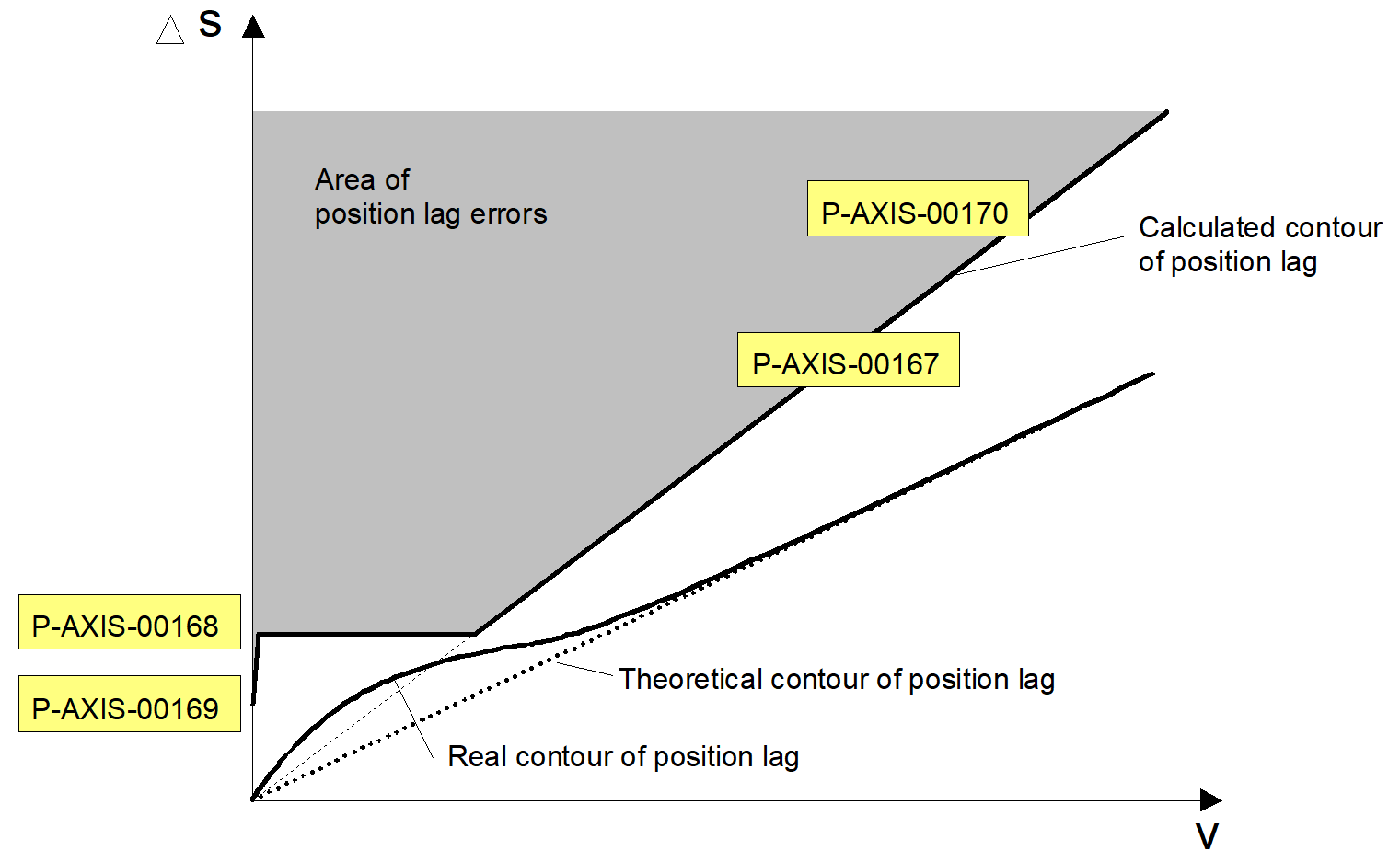
:If  < P-AXIS-00168, P-AXIS-00168 is used as the permitted position lag limit.
< P-AXIS-00168, P-AXIS-00168 is used as the permitted position lag limit.
At standstill, P-AXIS-00169 defines the permitted position lag.
The time offset of the permitted position lag is obtained by P-AXIS-00170. The figure below shows the areas of the permitted position lag for the linear method.
Notice

If position control takes place in the drive, the active position controller gain of the drive must be configured in the parameter P-AXIS-00099.
Here, the units must be taken into consideration in each case.
Notice
Recommended configuration:
P-AXIS-00169 ≥ 5 · ∆sStandstill
∆sStandstill: real position lag at standstill