Example: Robot
Distance control can be used with different kinematics (see also the “Introduction” chapter, Kinematics 5 to 10, Robot 45, Universal 91, Coupling 210, 96)
These kinematics are used for tool orientation.
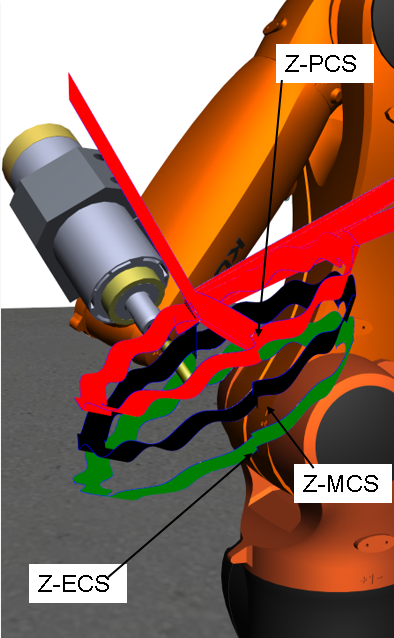
Below, distance control is used with a robot kinematic (Kinematic ID 45).
In this application example, the workpiece was inclined by 30° (PCS system). The orientation/programming of the tool was executed by the robot kinematic (Kin 45) The sensor deviation was simulated by a sinusoidal oscillation and the tool described a circle with phase advance. A short waiting time was added at the quadrant transitions to illustrate the effect of compensation more clearly. The various colours show the different compensation orientations.