Kinematic poses of six-axis articulated robot
Pose denotes the position and orientation of the TCP, The six-axis articulated robot kinematic described here (KIN_TYP_45) can achieve a pose with up to eight different joint configurations.
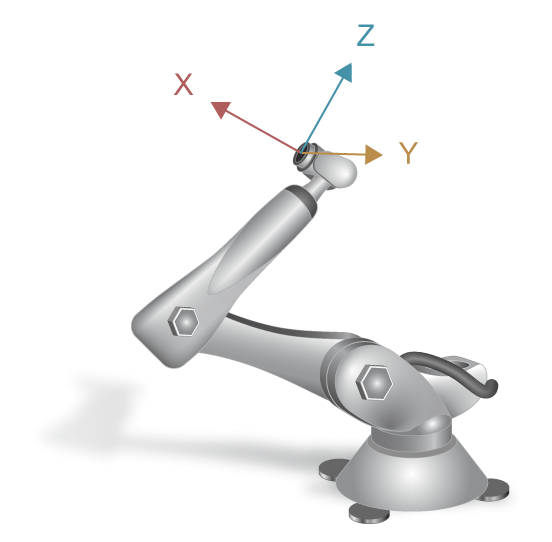
Pose 1- Status B000 |
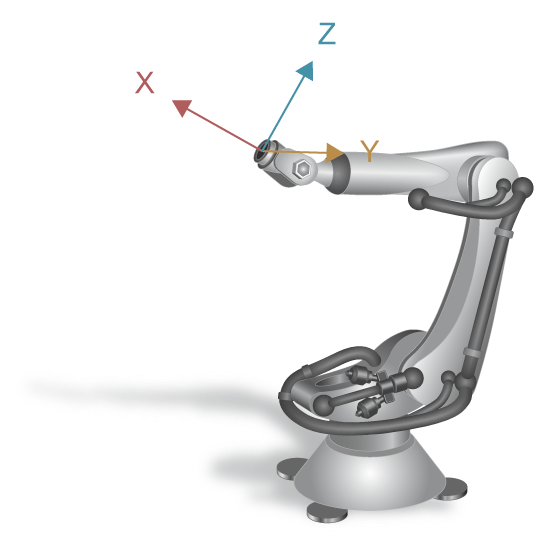
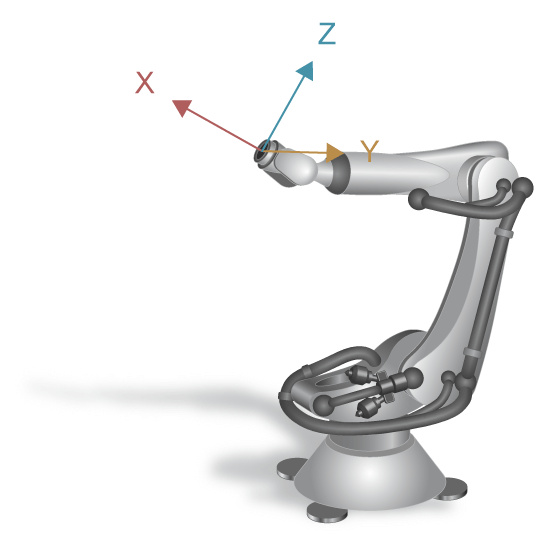
Pose 2- Status B001 |
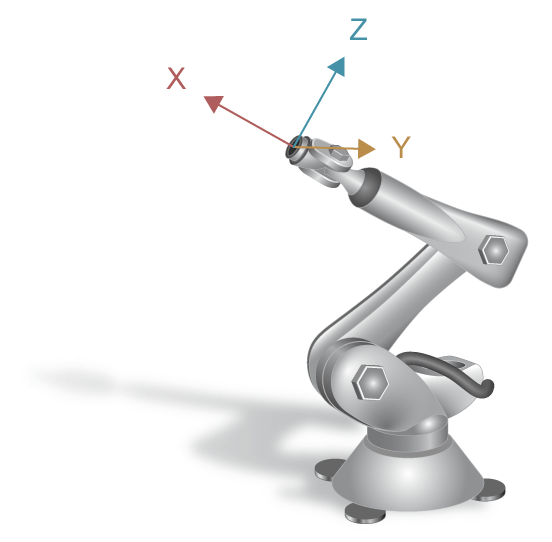
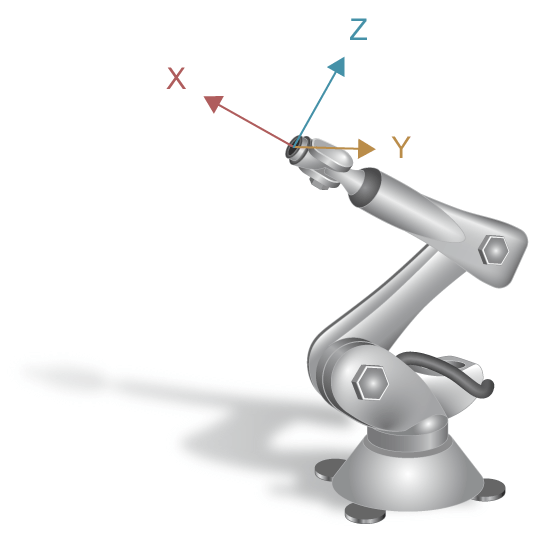
Pose 3- Status B010 |
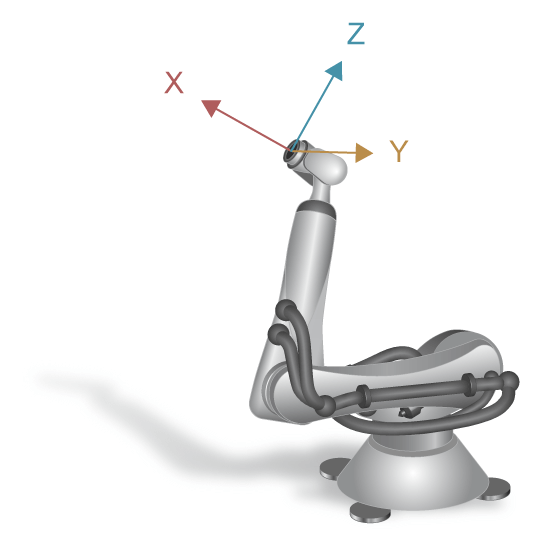
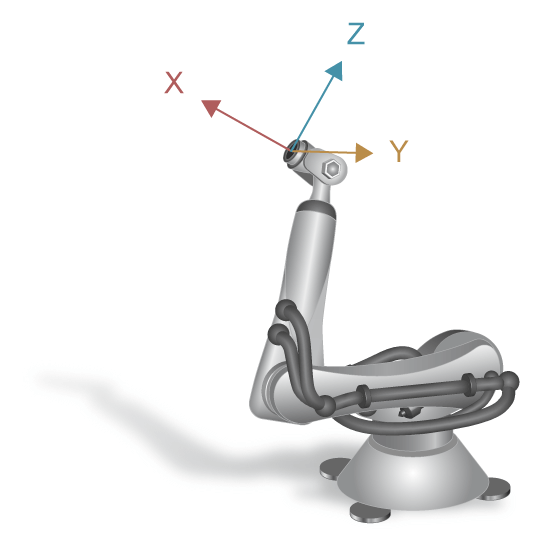
Pose 4- Status B011 |
Pose 5- Status B100 |
Pose 6- Status B101 |
Pose 7- Status B110 |
Pose 8- Status B111 |
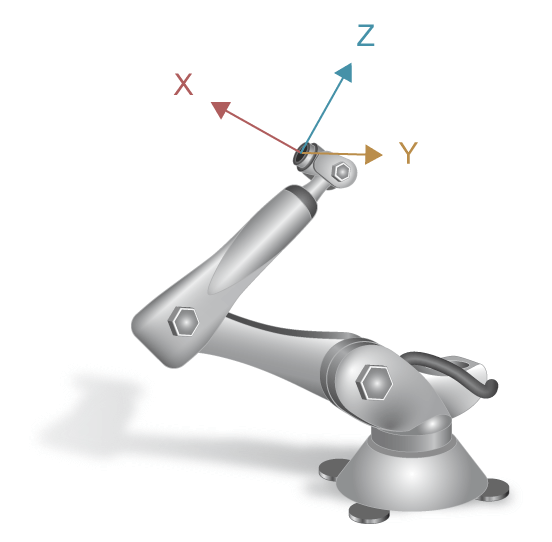
The possible joint configurations are identified by the pose status.
Notice

When a transformation is active, the robot cannot change its pose status.