MC_Halt
The MC_Halt FB leads to a controlled motion stop. The motion stop is always jerk-limited with the constant set input "Jerk” to build up the deceleration rate. It aborts every ongoing command by other motion FBs.
If the optional parameters ”Deceleration” and “Jerk” are not specified or set to <= 0, the dynamic values are taken from the corresponding axis list.
Contrary to the FB MC_Stop, a commanded FB MC_Halt may be aborted by commanding another motion FB. The “CommandAborted” output is then set to TRUE.
The MC_Halt FB sets the “Done” output as soon as the axis is at standstill.
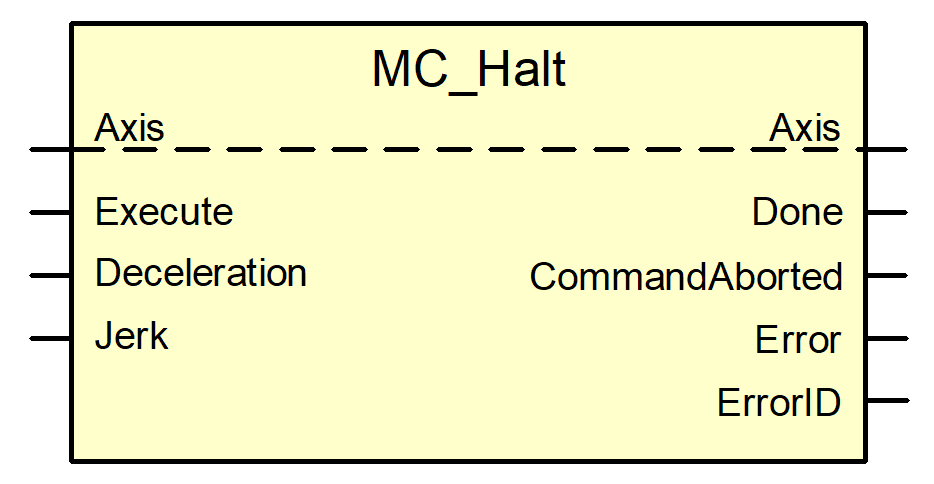
Block diagram
FB parameters
VAR_IN_OUT | |||
Variable name | Data type | Description | |
Axis | AXIS_REF | Axis reference | |
VAR_INPUT | |||
Variable name | Data type | Description | |
Execute | BOOL | Starts the command on the rising edge. | |
Deceleration | LREAL | Deceleration value. This value must be always be specified positive. Value range [0.0, 2147483647.0] | |
Jerk | LREAL | Jerk value. This value must be always be specified positive. Value range [0.0, 2147483647.0] | |
VAR_OUTPUT | |||
Variable name | Data type | Description | |
Done | BOOL | 0 velocity was reached. | |
CommandAborted | BOOL | TRUE indicates that the command was aborted by another command. | |
Error | BOOL | Is TRUE if an error occurs in the FB. | |
ErrorID | WORD | Error identifier | |
Behaviour of the FB:
- The “Deceleration” and “Jerk” input variables are monitored only for their value ranges in the FB. If the values are exceeded, an error number referring to the variable is output at the “ErrorID” output and “Error” is set to TRUE. Moreover, the deceleration value is limited in the motion controller. If a deceleration greater than getriebe[0].dynamik.a_max (P-AXIS-00008) is commanded, the motion is still executed. However, the values are limited to the parameterised values and a warning is issued.
- Practical values for jerk are between the minimum jerk of deceleration/100 s and the maximum jerk of deceleration/TA. The limit transition to non-jerk-limited velocity control lies at the minimum ramp time of TA. When the value is 0, the maximum ramp time in P-AXIS-00195 to P-AXIS-00198 is used to determine jerk.