Differences between Advanced Lifting and Lifting
Basically Advanced Lifting is recommended. It is independent of the path motion and a greater lifting height is reached. In exceptional cases it may be necessary to apply conventional lifting.
The table below provides a short comparison:
| 1. Advanced Lifting | 2. Lifting |
Maximum lifting height | high | medium |
Collision protection | high | lower |
Computing time (real-time task) | high | very low |
Path override changes | Limited increase possible | Z axis overload (=lift axis) possible |
Feed rate change | No limitation | Z axis overload (=lift axis) possible |
HSC slope (Type 3) | not possible | can call an implicitly called subroutine at program end. |
Maximum lift profile length | unlimited | Number of NC blocks is limited |
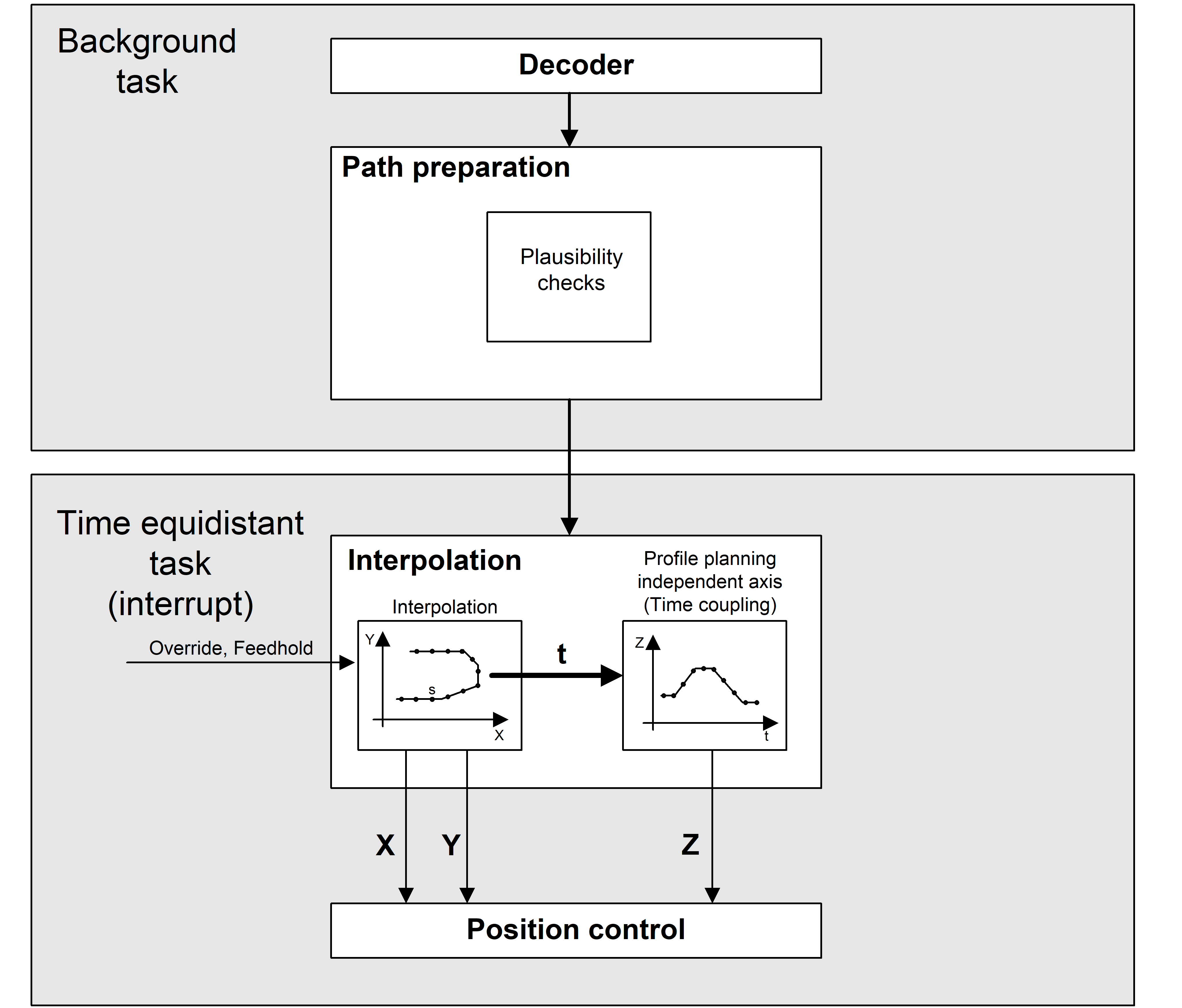
With Advanced Lifting profile planning must be executed in the real-time task of the controller This method therefore requires much more real-time computing time than the lifting method calculated in the path preparation task.
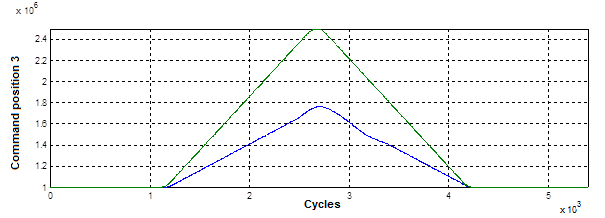
Compared with Lifting, Advanced Lifting achieves greater lifting heights:
In the lowering motion the path velocity override is limited to the value which was active at the start of the lowering motion.
In the upward motion of the lift axis a higher path override may no longer be accepted, otherwise the lift axis would not be able to reach the target position at the end of the lowering motion any more.
