Acceleration profiles
Selecting the acceleration profile defines the velocity on the programmed path, provided
- the specified permissible velocities,
- the accelerations and
- the set jerk are maintained.
The following modes are available :
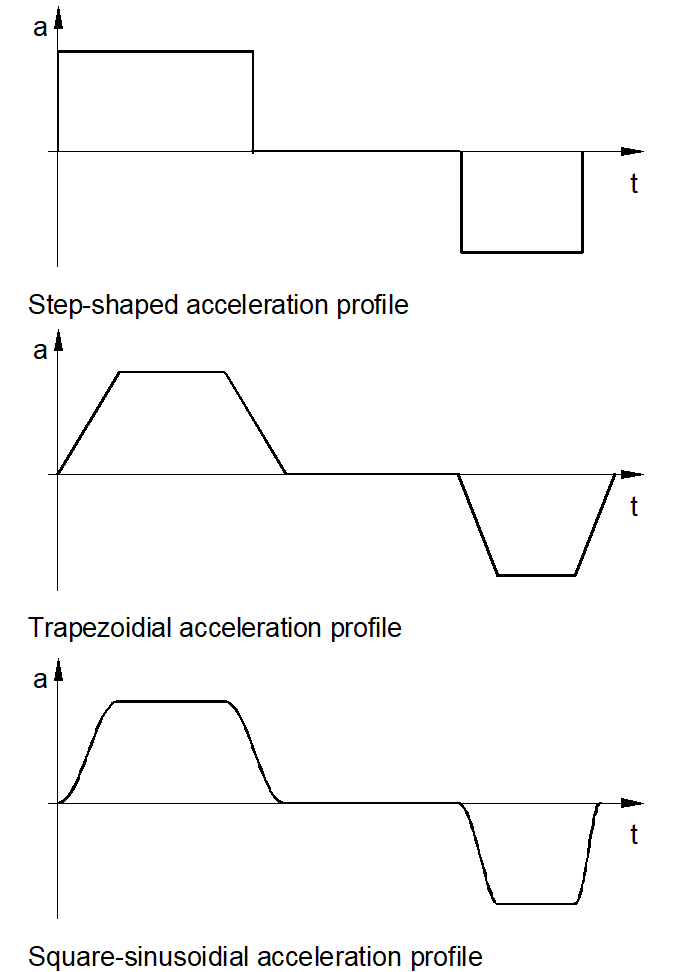
- Step-shaped acceleration profile with restriction of acceleration without limiting the jerk
- Trapezoidal acceleration profile
- Sine-square acceleration profile
Depending on the acceleration profile selected, the acceleration is set as shown in the acceleration profile below:
The NC controller calculates the path distance to be output in the current cycle for the programmed path based on distance data, velocity inputs in the NC program and the dynamic variables of the machine axes.
Planning the resulting velocity profile extends over several blocks and ensures that stopping is possible at all times without overshooting the permissible dynamic limits (look ahead).