Description
Task
Motions are generated by electronic probe systems or sensors. These motions should superimpose the programmed positions of axes when an NC program is interpolated.
This control helps to implement
- distance control (e.g. contact with the curved surface of a plate) or
- height control (e.g. to compensate for workpiece thickness tolerances).
Properties
A second measuring system is connected to the controller via a parameterisable sensor source. This measuring system can output axis-specific compensation values to an axis in addition to the interpolated command point to compensate the actual position of the axis.
Distance control is enabled and disabled in the
- NC program or
- via the PLC.
Variables relevant to distance control can be parameterised via the axis machine data.
Distance control operates in the interpolation cycle of the control system (GEO task).
Notice

Distance control is only available for SERCOS, PROFIdrive or CANopen drives.
Parameterisation overview
The motion generated by distance control can be influenced by machine data.
- Activate a smoothing filter
- Maximum permissible compensation value
- Maximum additive axis velocity
- Maximum permissible actual value jump of the probe system
- Maximum upper axis position
- Minimum lower axis position
- Tolerance value
- Dynamic weighting dependent on distance
(as of CNC Build V2.11.2804.02) - Dynamic weighting dependent on lowering movement
(as of CNC Build V2.11.2807.13)
Enable/disable is executed either by the NC program or the PLC.
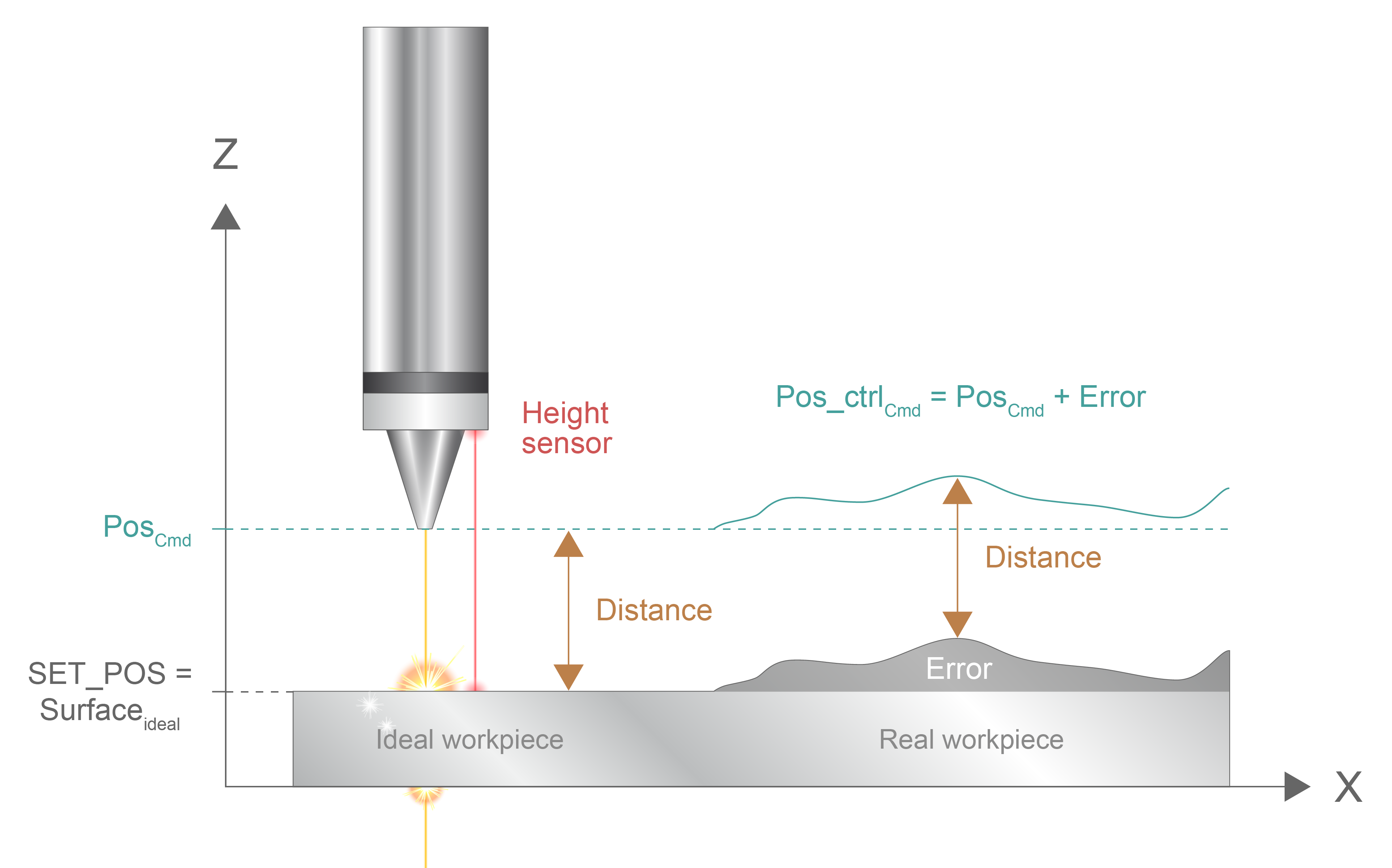
Correction of set position
The actual workpiece surface produces a height offset:

where

This results in a correction of the programmed command position PosCmd of the tool as follows:

Configuration overview
The encoder of the electronic probe system is connected to the controlled axis as actual value encoder 2. Make sure that the first configured encoder is used for axis position control and the second encoder for distance control. Encoder for distance control.
Attention

The axis-specific feed override and the axis-specific feedhold enable act on distance control (see [HLI// Control commands of an axis]).
When override is 0 or when feedhold is set, distance control is no longer active and the current value is frozen.