Description
Mechanical backlash
The play between the
- the drive and a moving machine part or
- between a sensor and a moving machine part is referred to as mechanical backlash.
For a moving machine part, mechanical backlash results in a deviation between the commanded position and the actual position. This especially has an effect when the direction of motion is reversed.
A distinction is made between the following kinds of mechanical backlash:
- Positive backlash
- Negative backlash
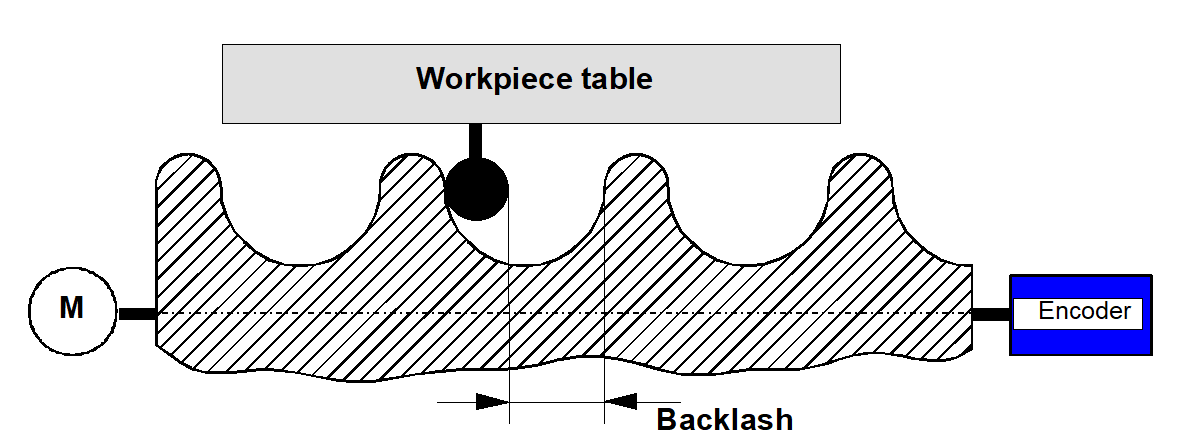
Positive backlash
Positive backlash occurs in systems in which
- the measuring system is connected directly to the drive and
- the backlash occurs between the drive and the moving mechanical part.
When the direction of movement reverses, the measuring system will detect a position change although the machine part is not yet moving due to the backlash.
This leads to a situation in which the machine part does not reach the commanded position, but travels too short by the backlash amount because the sensor that indirectly measures the position of the machine part is ahead of the machine part’s actual position.
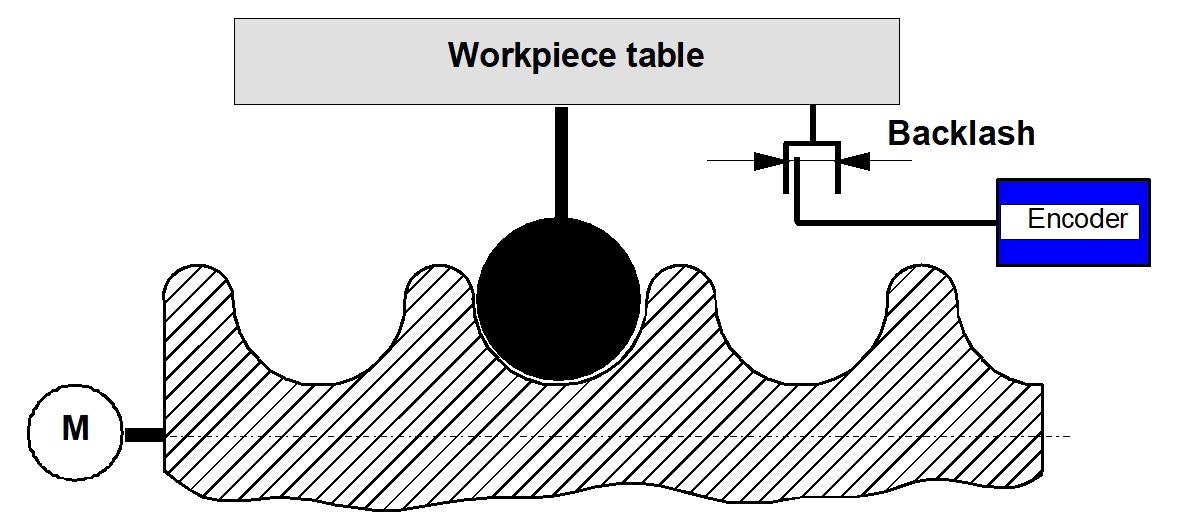
Negative backlash
Negative backlash is encountered in systems in which the backlash occurs between the moving machine part and the measuring system. When the direction is reversed, the machine part directly moves in the new direction without the measuring system detecting a position change.
In this case, the machine part moves further by the backlash amount than is required by the command because the sensor that directly measures the position of the machine part lags behind the position of the machine part.
Backlash compensation
The size of the backlash P-AXIS-00103 during on position control is taken into consideration depending on the type of mechanical backlash P-AXIS-00021 and acts on the calculation of the command variables.
Notice

The display of the absolute command position or actual position of the moving machine part does not include the compensation values and therefore represents the position of an ideal machine.
Effectiveness
When backlash compensation is selected, it is active directly after controller start-up, regardless of whether homing has taken place [FCT-M1//Description].
The algorithm compensates for the backlash in the 1st cycle of the path motion. A large backlash can cause strong excitation in the machine. To prevent this, the backlash can be distributed over several position control cycles P-AXIS-00243.