Additive current dependent on velocity
Additive current
The purpose of friction compensation is to compensate actually existing friction torque by way of an additional torque. It acts in the form of speed-dependent feedforward control of the motor current.
Notice

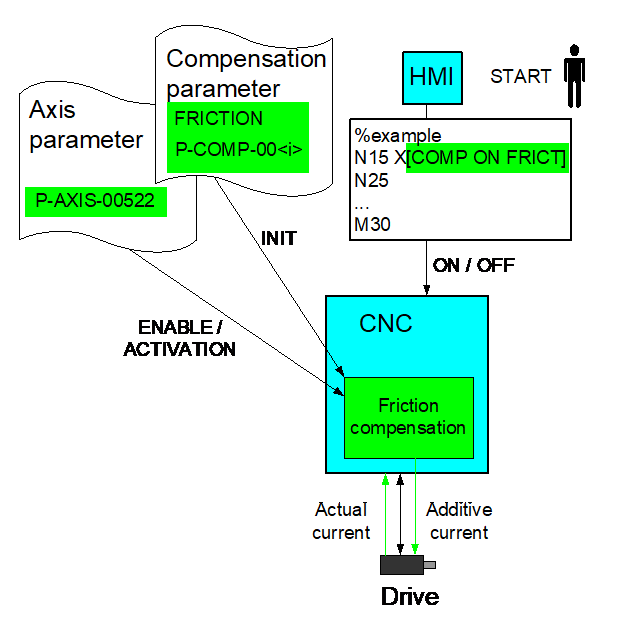
It is basically sufficient to command a additive current to the drive on the setpoint side for friction compensation.
However, to determine the characteristic curve for the current and verify compensation, it is also necessary to read the actual current.
Effect
The algorithm compensates for friction during path motions (v≠0) by an additional motor current.
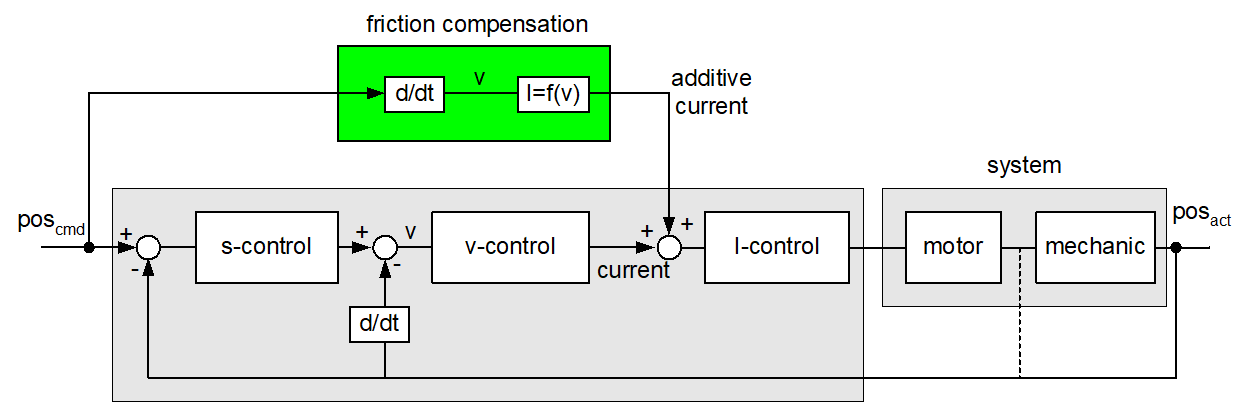
Control loop
The effect of friction compensation on closed-loop control is shown in the figure below.