Applying and using the Caller ID
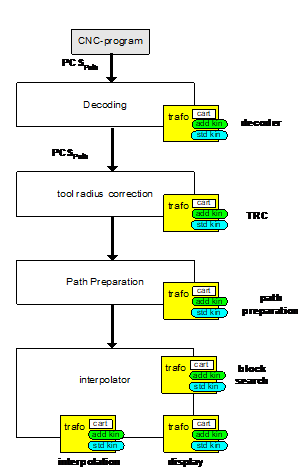
Example 1: Saving resources in path preparation (PathPreparation)
A transformation may be CPU-intensive and therefore time-consuming.
This may result in many calls to the backward transformation in PathPreparation and may impair the internal record supply under certain circumstances. To counteract this, a transformation with lower accuracy and therefore fewer required resources (computing time) can be used explicitly for the PathPreparation, for example. A transformation with lower accuracy can be used at selected points, such as PathPreparation, if only relatively minor effects occur to the function of the CNC or are expected. This is therefore a feasible solution to avoid impairing block supply.
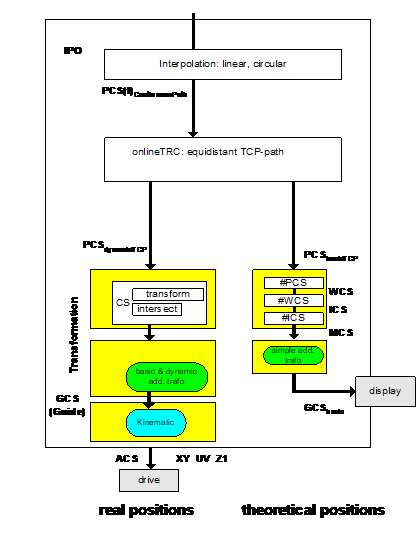
Example 2: Display the position of the additive transformation
During the interpolation, the additive transformation is called for display purposes (caller ID = 5 = EcCncTrafoCallerID_Display). These position values are accessible for each axis via CNC objects.
mc_ax_<i>_add_kin_pos_r
Additive transformation positions can also be verified by the COM task in the ISG object browser.
Attention

Forward transformation must always be inverse to backward transformation.
position = forward(backward(position))
If the transformation varies is dependent on the caller (caller_id), then disable this variation when the controller is initialised at standstill.