MC_Power
Der FB MC_Power schaltet die Leistung des Antriebs der durch AXIS_REF definierten Achse ein oder aus. Er ist der Gruppe der administrativen FB zugeordnet.
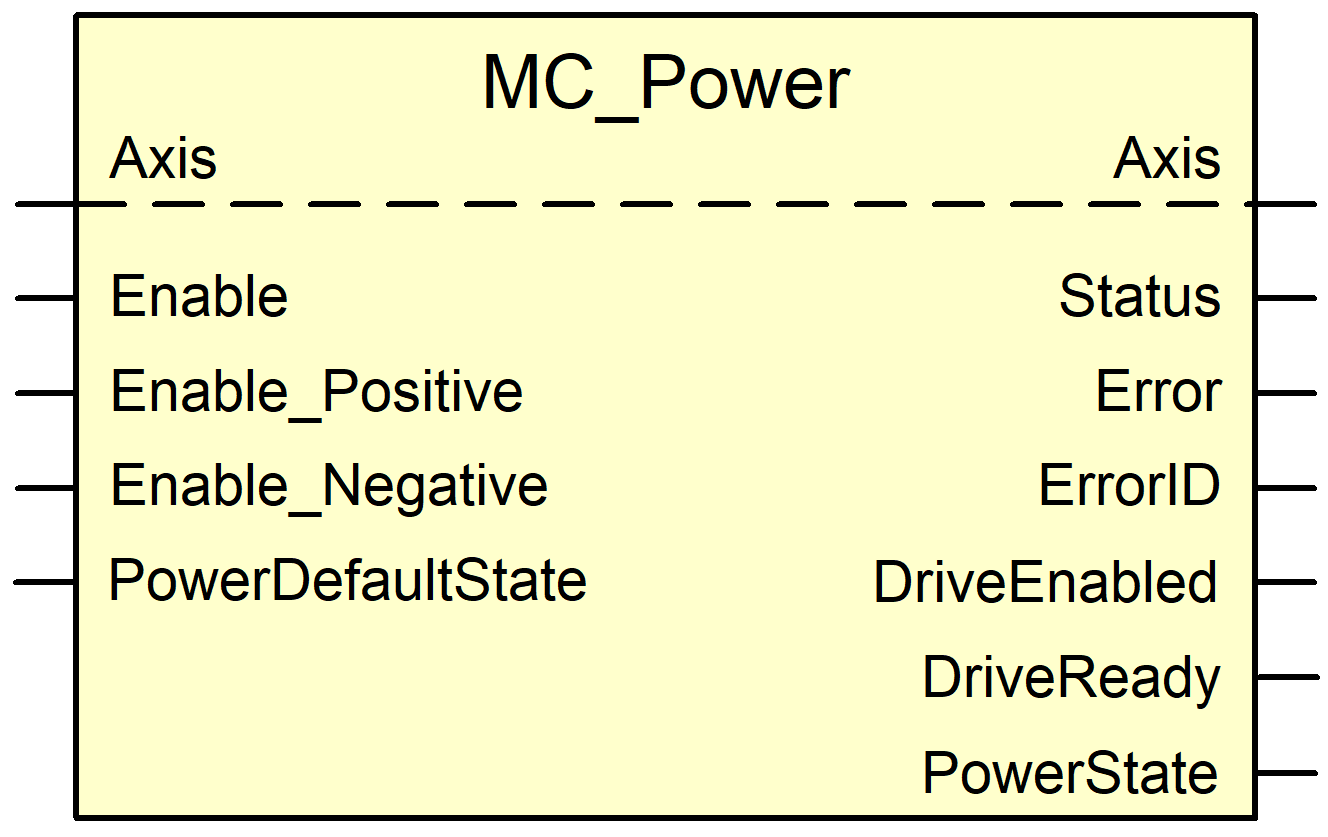
Blockdiagramm
Parameter des FB
VAR_IN_OUT | ||
Variablenname | Datentyp | Beschreibung |
Axis | AXIS_REF | Achsreferenz |
VAR_INPUT | ||
Variablenname | Datentyp | Beschreibung |
Enable | BOOL | Muss den Wert TRUE besitzen, sonst wird keine Leistung zugeschaltet. |
Enable_Positive | BOOL | Muss den Wert TRUE besitzen, sonst wird keine Leistung zugeschaltet. Die Freigabe nur der positiven Verfahrrichtung wird nicht unterstützt |
Enable_Negative | BOOL | Muss den Wert TRUE besitzen, sonst wird keine Leistung zugeschaltet. Die Freigabe nur der negativen Verfahrrichtung wird nicht unterstützt |
PowerDefaultState | MCV_DRIVE_ | Funktion verfügbar für CANopen-Antriebe: In diesen Zustand wird der Antrieb durch den Funktionsbaustein gebracht, solange der Ausgang "Status" FALSE zeigt, also mindestens einem der Enable…-Eingänge der Wert FALSE zugewiesen ist (siehe unten stehende Tabelle). Der Eingang ist als Standardwert mit mcvPowerStateDefault belegt. |
VAR_OUTPUT | ||
Variablenname | Datentyp | Beschreibung |
Status | BOOL | Der Wert TRUE zeigt an, dass der Antrieb drehmomentbehaftet ist und sich in Regelung befindet. |
Error | BOOL | Zeigt an, ob innerhalb des FB ein Fehler aufgetreten ist. |
ErrorID | WORD | Fehlerkennung |
DriveEnabled | BOOL | Der Wert TRUE zeigt an, ob der Antrieb bereit zur Leistungsfreigabe ist. |
DriveReady | BOOL | Der Wert TRUE bedeutet, dass sich der Antrieb in Regelung befindet. |
PowerState | MCV_DRIVE_ | Zustand, in dem sich der Antrieb befindet (siehe folgende Tabelle). |
Werte des Aufzählungstyps MCV_DRIVE_POWER_STATE
Konstante | Wert | Bemerkung |
mcvPowerStateNotReady | 0 | Antrieb nicht bereit zum Betrieb. |
mcvPowerStateReadyForPower | 1 | Antrieb bereit zum Betrieb. |
mcvPowerStateReadyForOperation | 2 | Antrieb eingeschaltet. |
mcvPowerStateDriveEnabled | 3 | Antrieb bereit, aber ohne Reglerfreigabe. |
mcvPowerStateOperational | 4 | Antrieb bereit und folgt Sollwertvorgaben. |
mcvPowerStateDefault | 5 | Mit diesem Wert ist der Eingang "PowerDefaultState" vorbelegt. Damit gibt der MC_Power erst dann Befehle an den Antrieb, wenn allen 3 "Enable_..."-Eingängen TRUE zugewiesen wurde. Ist einem der 3 "Enable…"-Eingänge FALSE zugewiesen führt dieser Wert dazu, dass der Antrieb in den im Antrieb konfigurierten Grundzustand überführt wird. |
Verhalten des FB:
- Die Leistung für den Antrieb wird nur dann zugeschaltet, wenn sämtliche 3 Eingänge den Wert TRUE besitzen.
- Unabhängig vom Zustand der Achse lässt sich dieser FB beauftragen und der Auftrag an den Motion Controller absetzen.
- Falls ein Fehler in anderen Achsen vorliegt, reagiert der FB MC_Power mit der Ausgabe des Fehlers P-ERR-40001 (ERR_PLC_AX_MC) am Funktionsblock und zeigt an einem Funktionsblock MC_ReadAxisError an seinem Ausgang AxisErrorID den Fehler P-ERR-294039.
- Das Verhalten der Achse hängt vom parametrierten Antriebstyp ab. Ist für die Achse der Antriebstyp Simulation (P-AXIS-00020) parametriert, so wird auch der Output „Status“ simuliert.