Jerk-limited HSC acceleration profile
Description and properties
This profile can be activated for path motions and offers advantages for short blocks when acceleration must be built up and decreased over a relatively large number of blocks.
Parameterisation of acceleration ramps with feed blocks is identical to default jerk-limited profiles. However, the parameterisation of different acceleration and deceleration values is less practical for HSC machining.
Setting profile parameters for a rapid traverse block and feedhold also correspond to a default jerk-limited profile.
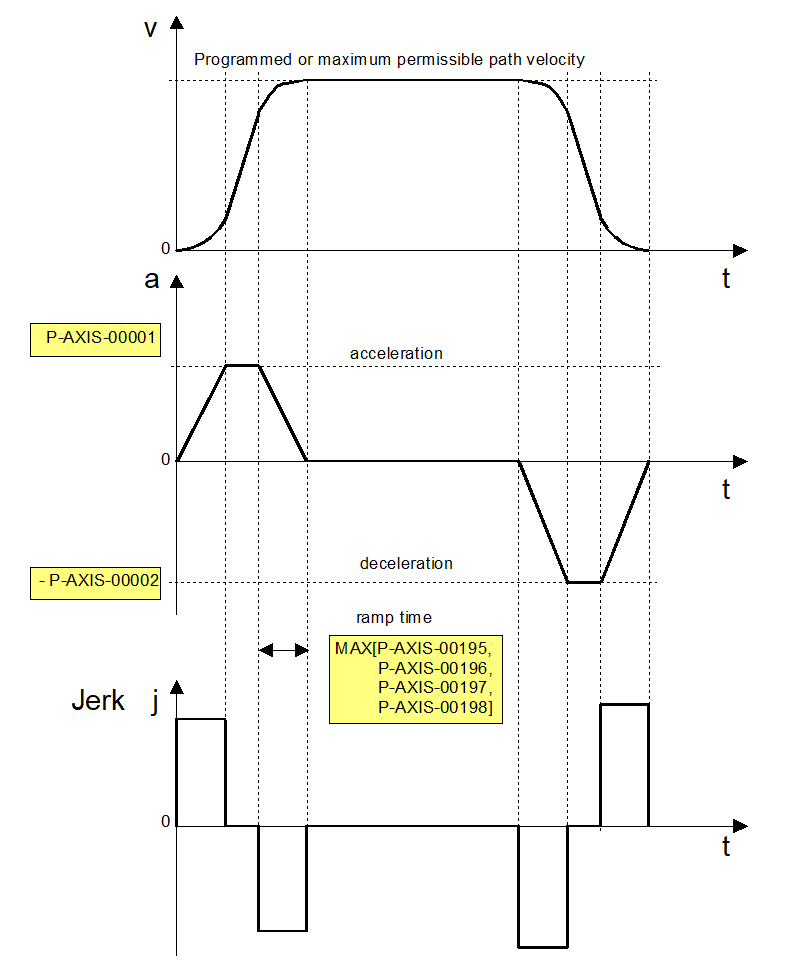
There are differences in the effectiveness of ramp time parameters for feed blocks.
The maximum of the following parameters is used as ramp time:
Build-up and decrease times for acceleration and deceleration are then identical.
Determining ramp time
When the maximum permissible acceleration and the maximum permissible jerk are specified, the ramp time can be determined using the following equation:
|
|

where tr: ramp time, j: permissible jerk, a: permissible acceleration
Example

Determining ramp time
a: 1000 mm/s2, j: 20m/s3
getriebe[0].slope_profil.a_grenz 1000
getriebe[0].slope_profil.tr_grenz 50000
In many cases, there are no jerk values available for a machine. In this case, the ramp times must be increased empirically starting from default parameter values until the axis can move without exciting vibrations.
The ramp times should be set as small as possible and only as large as necessary since they influence positioning times.