Examples
Minimum permitted distance
Programing Example

Minimum permitted distance between a collision pair
Initialisation in the axis parameter list of X1
kopf.achs_nr 1
kenngr.achs_mode 0x8001
Initialisation in the axis parameter list of X2 (collision partner of X1)
kopf.achs_nr 2
kenngr.achs_mode 0x8001
kenngr.coll_check_ax_nr 1
kenngr.coll_offset 200000
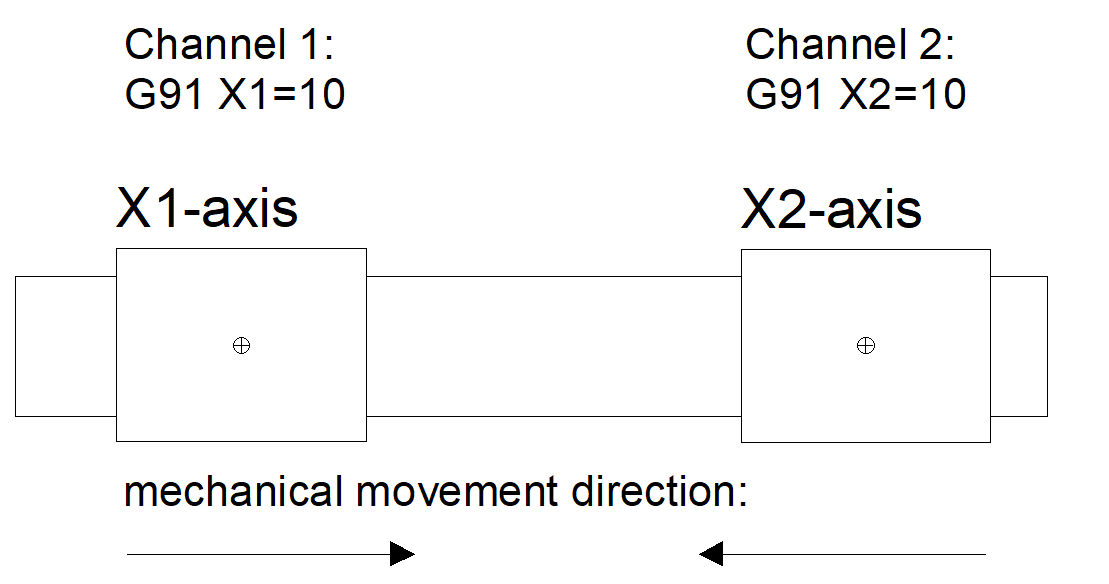
Axis motion direction
The collision monitor assumes that the axes affected move in the same direction. If a motion in positive direction was programmed for the two axes in a collision pair, the axes also move mechanically in the same direction.
If this precondition is not fulfilled, it must be displayed in P-AXIS-00262 (coll_moving_dir_inverted) of the master axis.
Programing Example
2-channel collision pair with mechanically inverted motion directions
Channel 1:
Initialisation in the axis parameter list of X1
kopf.achs_nr 1
kenngr.achs_mode 0x8001
Channel 2:
Initialisation in the axis parameter list of X2 (collision partner of X1)
kopf.achs_nr 6
kenngr.achs_mode 0x8001
kenngr.coll_check_ax_nr 1
kenngr.coll_offset 200000
kenngr.coll_moving_dir_inverted 1
kenngr.coll_decelerate_chan 1
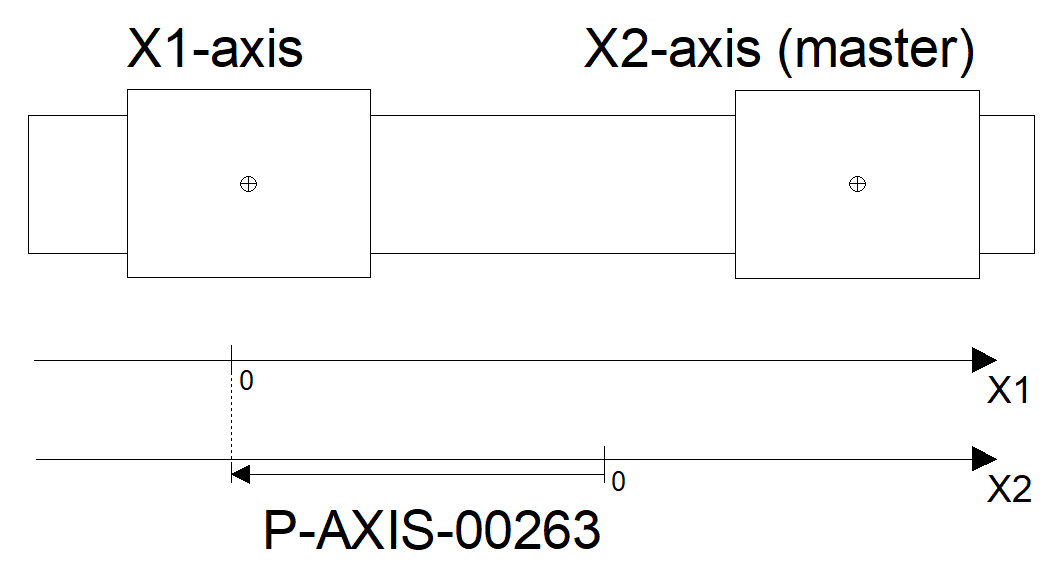
Zero positions of the axes
If the collision axes do not have the same zero position, then enter the zero offset in P-AXIS-00263 (coll_zero_position_offset). The value of the P-AXIS-00263 is equal to the position of the zero position of the collision partner axis in the axis coordinate system of the master axis.
Programing Example
Collision pair with different zero positions
Initialisation in the axis parameter list of X1
kopf.achs_nr 1
kenngr.achs_mode 0x8001
Initialisation in the axis parameter list of X2 (collision partner of X1)
kopf.achs_nr 2
kenngr.achs_mode 0x8001
kenngr.coll_check_ax_nr 1
kenngr.coll_offset 200000
kenngr.coll_zero_position_offset -1000000
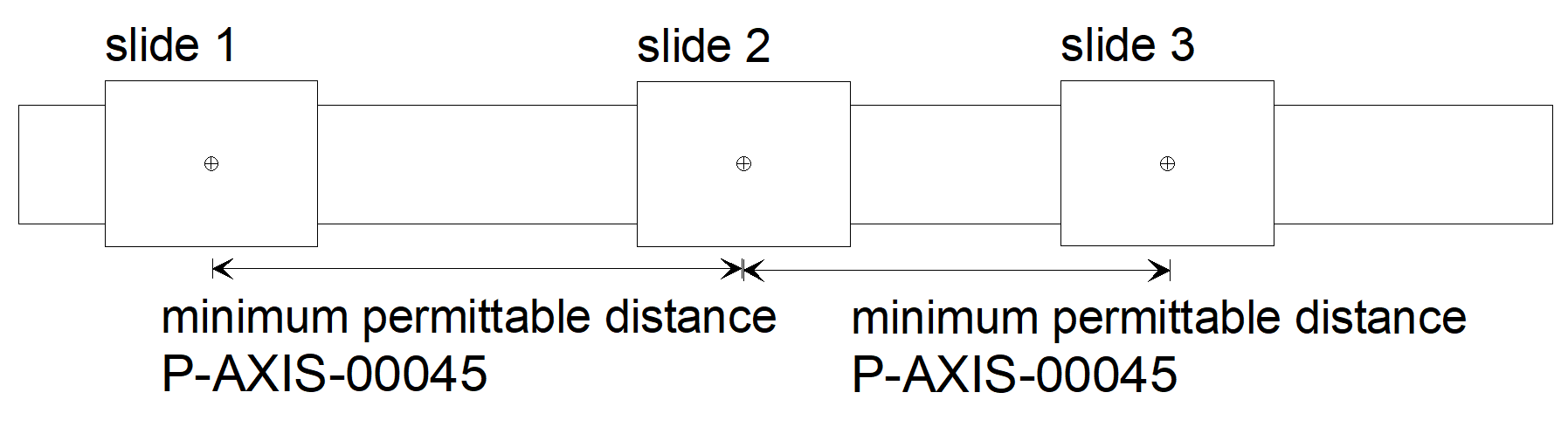
Configuration of 2 collision pairs

Programing Example
Configuration of 2 collision pairs
This example defines two collision pairs (X1-X2, X2-X3):
Initialisation in the axis parameter list of X1
kopf.achs_nr 1
kenngr.achs_mode 0x8001
Initialisation in the axis parameter list of X2 (collision partner of X1)
kopf.achs_nr 2
kenngr.achs_mode 0x8001
kenngr.coll_check_ax_nr 1
kenngr.coll_offset 200000
Initialisation in the axis parameter list of X3 (collision partner of X2)
kopf.achs_nr 3
kenngr.achs_mode 0x8001
kenngr.coll_check_ax_nr 2
kenngr.coll_offset 300000