Channel parameters
P-CHAN-00057 | Predefine measurement type |
Description | Seven different measurement types are available. This element sets the required measurement type. |
Parameter | messtyp |
Data type | UNS16 |
Data range | 1*: Measurement travel with at least one axis, Measurement feed programmable by F word. 2*: Measurement travel with exactly one axis. Measurement feed is specified in the axis data list. 3: Measurement travel with at least one axis, Measurement feed programmable by F word, optionally continue motion up to the target point. 4: Measurement travel only with the maximum of 3 main axes, Measurement feed programmable by F word. 5: Interruptible measurement travel with at least one axis, Measurement feed programmable by F word. 6: Interruptible measurement travel with at least one SERCOS axis, Measurement feed programmable by F word. 7*: Measurement travel (G100) by moving to a fixed stop with at least one axis, Measurement feed programmable by F word. |
Dimension | ---- |
Default value | 1 |
Remarks | * for these measurement types a measurement travel is also possible with independent axes. This measurement type can be changed at any time in the NC program with #MEAS MODE or #MEAS [TYPE..]. Further information is described in detail in [PROG]. Parameterisation example: Select measurement type 3 for a measurement travel with two axes and then continue motion up to the programmed target point. Measurement type 3 |
P-CHAN-00097 | Valid deceleration ramp at FEEDHOLD |
Description | This parameter defines the deceleration ramp used when FEEDHOLD is active. When P-CHAN-00097 is set, the parameterised delay is dependent on the slope used. With a linear slope, the delay is defined by P-AXIS-00024; if the slop is non-linear, it is defined by P-AXIS-00053 and P-AXIS-00081. |
Parameter | use_drive_curr_limit |
Data type | BOOLEAN |
Data range | 0: When FEEDHOLD is set, deceleration takes place using the currently valid deceleration rate. 1: When FEEDHOLD is set, deceleration takes place using the parameterised delay depending on the slope used. If these two parameters are not set, deceleration takes place at the currently valid deceleration rate (P-AXIS-00004). |
Dimension | ---- |
Default value | 0 |
Remarks |
|
P-CHAN-00176 | Error reaction with measurement type 1 |
Description | With measurement type 1, this parameter can influence the error reaction when the measurement signal is missing from the measurement block. |
Parameter | meas_error_no_signal |
Data type | BOOLEAN |
Data range | 0: No output of an error message if no measurement signal is received (default). 1: Output of an error message if no measurement signal is received. |
Dimension | ---- |
Default value | 0 |
Remarks | Parameterisation example: meas_error_no_signal 1 |
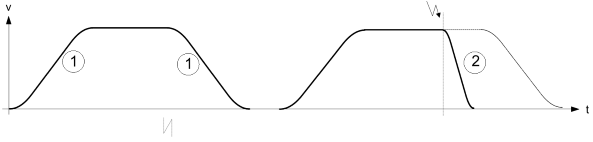
P-CHAN-00214 | Active delay with measurement signal |
Description | In general, the effective feedhold deceleration is selected in all motion blocks by the channel parameter P-CHAN-00097 . The controller uses this deceleration to brake motion by default, even after the measurement signal is activated (e.g. measuring probe). Set the parameter to 1 if braking is required on activation of the measurement signal with rapid traverse deceleration. |
Parameter | meas_deceleration_mode |
Data type | UNS16 |
Data range | 0: When the measurement signal is received, the motion is braked with feedhold deceleration (P-AXIS-00053 for non-linear slope) (default). 1: When the measurement signal is received, the motion is braked with rapid traverse deceleration (P-AXIS-00004 for non-linear slope). |
Dimension | ---- |
Default value | 0 |
Remarks | Parameterisation example: meas_deceleration_mode 1 |
P-CHAN-00266 | Error reaction with measurement type 7 |
Description | With measurement type 7 (measuring with motion to fixed stop), this parameter influences the error response when the fixed stop is not detected in the measurement block. If no error message is output when the fixed stop is not found, the CNC still goes to the position of the current axis actual value at the end of the measurement travel in order to eliminate a possible position lag (e.g. if the specified position lag is not reached completely). |
Parameter | meas_fixed_stop_no_error |
Data type | BOOLEAN |
Data range | 0: Output of an error message if the fixed stop is not detected (default). 1: No output of an error message if the fixed stop is not detected. |
Dimension | ---- |
Default value | 0 |
Remarks | Parameterisation example: meas_fixed_stop_no_error 1 |
P-CHAN-00296 | Active dynamic for measurement run |
Description | The measurement travel profile planning is executed based on G00 dynamic parameters. In general, this ensures that the system can stop the motion in good time if the probe deflection is limited. If the measurement travel profile planning must be executed with G01 values, set the parameter to 1. The deceleration ramp used when the measuring signal is received is always dependent on P-CHAN-00097 and P-CHAN-00214. |
Parameter | meas_use_std_dynamic |
Data type | BOOLEAN |
Data range | 0: The measurement travel profile planning is executed based on rapid traverse acceleration values (G00) dependent on P-CHAN-00097 and P-CHAN-00214 . The CNC functions for acceleration and ramp time weighting are not effective here. 1: The dynamics of the measurement travel is dependent on P-CHAN-00097 and P-CHAN-00214 and is executed based on the dynamics of feed blocks (G01). CNC functions for acceleration and ramp time weighting can be used here. The deceleration ramp used when the measurement signal is received is always a_feedh. |
Dimension | ---- |
Default value | 0 |
Remarks | Parameterisation example: meas_use_std_dynamic 1 The effective dynamics dependent on the parameters P-CHAN-00097 and P-CHAN-00214 are shown in the table below. |