Default homing
Default homing is the most commonly used method in practice to reference machine axes.
Condition
- Default homing requires the presence of a reference cam.
- Default homing executes the cam clearance of the machine axis.
- In general, a counter hardware with latch input is required to achieve high referencing accuracy.
Parameterisation | P-AXIS-00156 (ref_ohne_nocken) | 0 , with reference cam |
| P-AXIS-00157 (ref_ohne_rev) | 0 , with cam clearance |
Chronological sequence
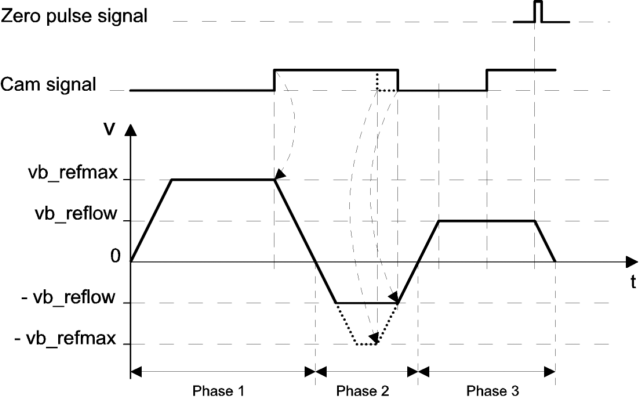
The chronological sequence of default homing normally occurs in 3 phases:
- Phase 1: Move to reference cam
- Phase 2: Move away from reference cam
- Phase 3: Move to reference cam with referencing
The figures below show the sequence of default homing.
Zero pulse
When referencing with zero pulse and with the required hardware support, the zero pulse results in the immediate latching of the counter value provided the strobe input was previously activated. In this way, the motion velocity has no influence on referencing accuracy when referencing is executed with zero pulse evaluation.
A zero pulse is not necessarily required for default homing. The zero pulse is evaluated in Phase 3 during the referencing process when the reference cam switch is operated.
Referencing only with reference cam without zero pulse reduces referencing accuracy depending on the motion velocity. Referencing without zero pulse is depicted in Figure 2‑3.
Notice

The following velocity-path diagrams show in simplified form the acceleration and deceleration phases as linear straight lines.