Overview
Activation
Crosstalk compensation is activated in the axis machine data record of the slave axis by P-AXIS-00789 (lr_param.crosstalk).
Programing Example

Excerpt from the axis parameter list:
:
lr_param.crosstalk 1
:
Notice

Crosstalk compensation can also be used for a gantry axis group. A compensation value list must then be specified for each axis in the gantry combination (crosstalk compensation slave).
Compensation value lists can therefore have different settings for each gantry axis.
Activating/deactivating
Crosstalk compensation (ON if compensation is activated) can be switched on or off at any time when the slave axis is at standstill. The slave axis command positions displayed are offset with the offset values.
Filter:
These compensation values can be smoothed by using a sine-square filter. The parameter P-COMP-00064 (n_cycles) switches the filter order to activate it.
Direction dependency of compensation
If position errors are dependent on the motion direction, compensation can be configured direction-dependent using the P-COMP-00084 parameter.
Crosstalk compensation modes
Three modes are provided for crosstalk compensation.
Mode 1:
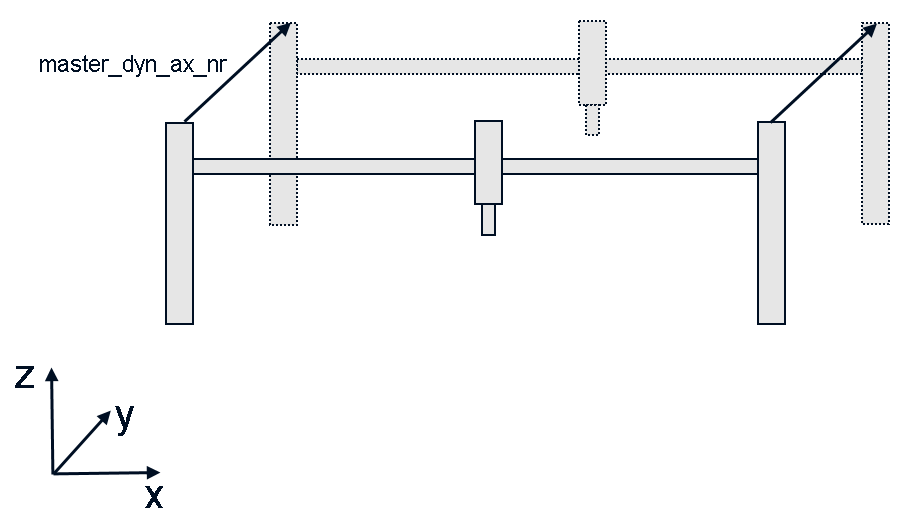
An acceleration and the related compensation value are specified. With accelerations less than the specified values, the compensation value is linear interpolated.
Mode 2:
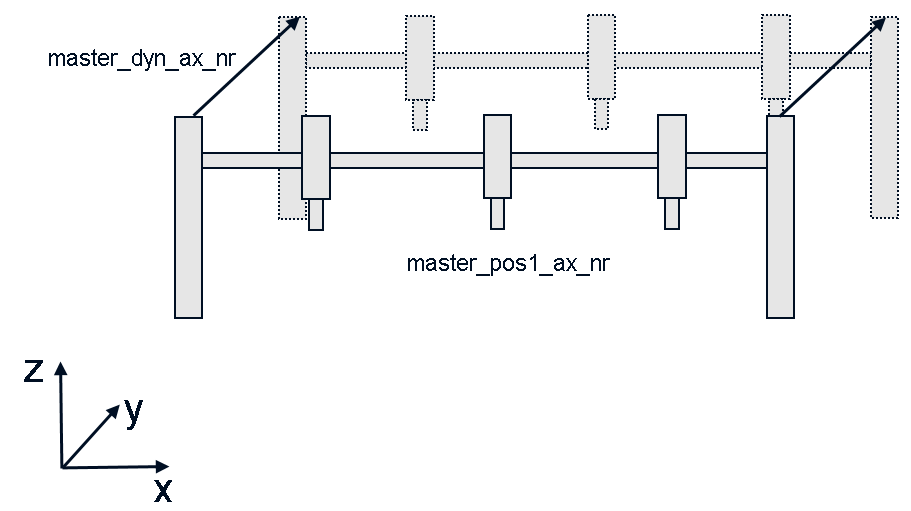
Compensation is calculated using an adaptation axis which is obtained by the user conducting three measurement tests. The measurement tests are conducted at various positions on the adaptation axis. Compensation is then calculated using the position of the adaptation axis and the current acceleration.
Mode 3:
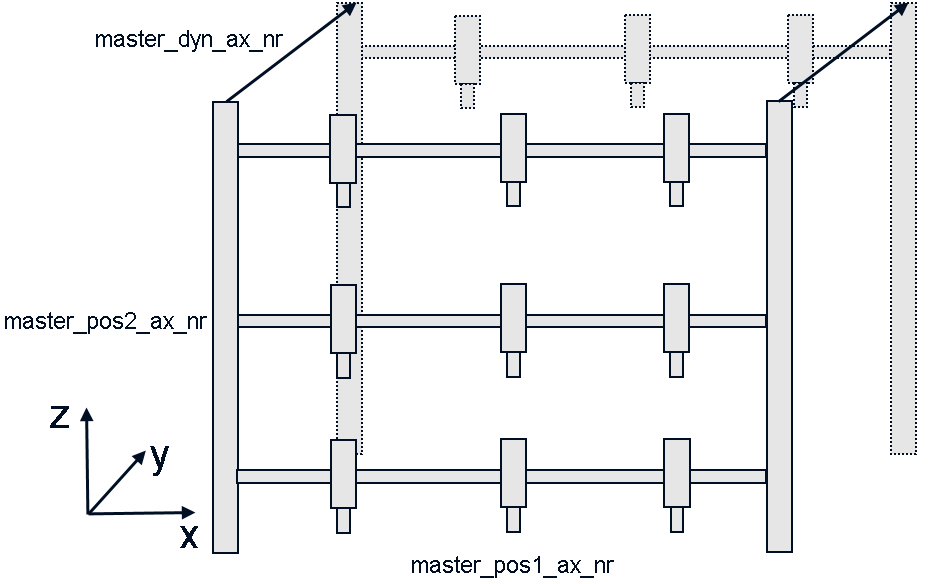
Two adaptation axes can be specified. The user can enter up to 15 measurement tests in the compensation value list. Crosstalk compensation calculates compensation values using surface interpolation.
Here, please note that the measurements must cover the complete workspace. If this is not the case, incorrect compensation values can occur with positions outside the specified measuring range.
Management data of the crosstalk compensation list
General data of the list body is entered in the structure kw.crosstalk.*. It contains the following elements.
Management data elements
Variable name | Type | Meaning |
mode | UNS08 | Compensation mode |
master_dyn_ax_nr | UNS16 | Logical axis number of the master axis whose acceleration is used as the input variable of the compensation list. |
master_pos1_ax_nr | UNS16 | Logical axis number of the first adaptation axis. |
master_pos2_ax_nr | UNS16 | Logical axis number of second adaptation axis |
n_cycles | UNS16 | Number of cycles of the sine-square filter. |
manual_activation | BOOLEAN | 0: (Default) The CNC activates crosstalk compensation automatically as soon as the required preconditions are met. |
max_points | UNS32 | Number of measurement tests in the compensation value list. |
acceleration | SGN32 | Acceleration [mm/s²] in case of axis excursion. |
deceleration | SGN32 | Negative acceleration [mm/s²] in case of axis excursion. |
velocity_dependent | BOOLEAN | Different compensation values for different motion directions. |
|
|
|
Compensation values of crosstalk compensation
The corresponding compensation value of the slave axis is entered for each acceleration in the list kw.crosstalk.table[i].*. The compensation list is valid for positive and negative directions of acceleration.
Compensation value list
Variable name | type | Meaning |
position[i].ax_1 | SGN64 | Position of the first adaptation axis with acceleration test i |
position[i].ax_2 | SGN64 | Position of the second adaptation axis with acceleration test i |
position[i].correction_accelerate_dir_pos | SGN64 | Compensation value for acceleration in positive motion direction |
position[i].correction_decelerate_dir_pos | SGN64 | Compensation value for deceleration in positive motion direction |
position[i].correction_accelerate_dir_neg | SGN64 | Compensation value for acceleration in negative motion direction |
position[i].correction_decelerate_dir_neg | SGN64 | Compensation value for deceleration in negative motion direction |