Active dynamic for measurement run (P-CHAN-00296)
P-CHAN-00296 | Active dynamic for measurement run |
Description | The measurement travel profile planning is executed based on G00 dynamic parameters. In general, this ensures that the system can stop the motion in good time if the probe deflection is limited. If the measurement travel profile planning must be executed with G01 values, set the parameter to 1. The deceleration ramp used when the measuring signal is received is always dependent on P-CHAN-00097 and P-CHAN-00214. |
Parameter | meas_use_std_dynamic |
Data type | BOOLEAN |
Data range | 0: The measurement travel profile planning is executed based on rapid traverse acceleration values (G00) dependent on P-CHAN-00097 and P-CHAN-00214 . The CNC functions for acceleration and ramp time weighting are not effective here. 1: The dynamics of the measurement travel is dependent on P-CHAN-00097 and P-CHAN-00214 and is executed based on the dynamics of feed blocks (G01). CNC functions for acceleration and ramp time weighting can be used here. The deceleration ramp used when the measurement signal is received is always a_feedh. |
Dimension | ---- |
Default value | 0 |
Remarks | Parameterisation example: meas_use_std_dynamic 1 The effective dynamics dependent on the parameters P-CHAN-00097 and P-CHAN-00214 are shown in the table below. |
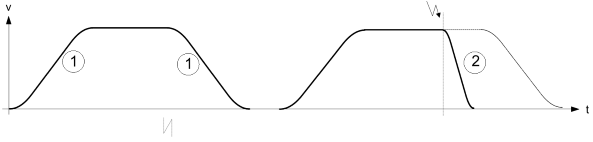
Dynamics for measurement travel with non-linear slops
Active dynamic for measurement run | Active delay with measuring signal | Valid deceleration ramp at FEEDHOLD | Profile dynamic (1) (limiting algorithm) measurement signal inactive | Deceleration ramp (2) (limiting algorithm) measurement signal active |
0 | 0 | 0 | Acceleration in rapid traverse | Acceleration in rapid traverse |
0 | 0 | 1 | Acceleration in rapid traverse | Deceleration at feedhold |
0 | 1 | X | Acceleration in rapid traverse | Acceleration in rapid traverse |
1 | X | X | Acceleration at machining P-AXIS-00001 or delay at machining | Deceleration at feedhold |
Dynamics for measurement travel with non-linear slops
Active dynamic for measurement run | Active delay with measuring signal | Valid deceleration ramp at FEEDHOLD | Profile dynamic (1) | Deceleration ramp (2) measurement signal active |
0 | 0 | 0 | Acceleration in rapid traverse or delay at machining | Acceleration in rapid traverse or delay at machining |
0 | 0 | 1 | Acceleration in rapid traverse or delay at machining | Deceleration at feedhold |
0 | 1 | X | Acceleration in rapid traverse or delay at machining | Acceleration in rapid traverse |
1 | X | X | Acceleration at machining or delay at machining | Deceleration at feedhold |