NC-controlled homing to fixed stop with DSE drives
In order to use this referencing method, the axis parameter P-AXIS-00299 (kenngr.homing.homing_type) must be parameterised with the value TORQ.
This referencing method is implemented for the following drive interfaces (see P-AXIS-00020):
Value | Meaning |
0x0004 | Drive simulation |
0x0009 | Generic drive interface |
Other general parameters must be assigned values to define how homing is to run with motion to a fixed stop. They are In the axis list, they are indicated by the prefix kenngr.homing. prefix; see table:
General parameters for referencing to fixed stop
Name | Dimension | Value range | Description |
torq_min_distance | 0.1 µm | < torq_max_distance | Minimum distance up to detection of the reference position |
torq_max_distance | 0.1 µm | 0 ... MAX_SGN23 | Maximum distance up to detection of the reference position |
torq_homing_dir |
| [POSITIVE, NEGATIVE] | Direction of reference point travel |
torq_detect_velocity_limit | 0.1% | 0 ... 1000 | Speed limit for detection of the reference position |
torq_retraction_distance | 0.1 µm | MAX_SGN32 | Withdrawal distance after detection of the reference position |
torq_homing_position | 0.1 µm | MAX_SGN32 | Reference position |
torq_detect_time | µs | MAX_UNS32 | Minimum time that the limit torque must be exceeded for the reference position to be detected. |
The parameters that are dependent on the gear stage are indicated by the prefix getriebe[X].homing. In this case, an ordinal number must be entered for X for each gear stage; see table:
Gear stage-specific parameters for referencing to fixed stop
Name | Dimension | Value range | Description |
torq_move_acceleration | mm/s2 | <= a_max | Acceleration |
torq_move_velocity | µm/s | <= vb_max | Velocity for axis motion |
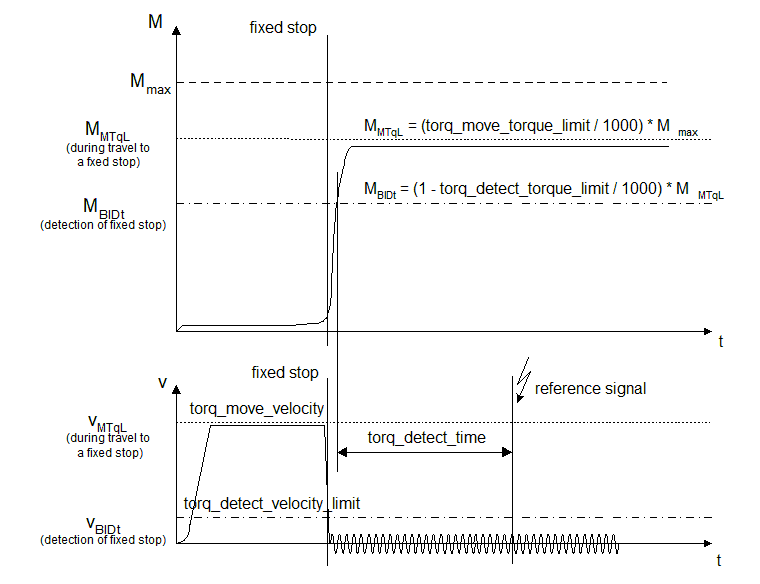
torq_move_torque_limit (P-AXIS-00342) | 0.1% | 0 ... 1000 | Percentage torque limit for motion |
torq_detect_torque_limit (P-AXIS-00343) | 0.1% | 0 ... 1000 | Limit for detection of the standing axis. Percentage value referred to torq_move_torque_limit. |
The graphic below shows the way in which the parameters listed have an influence on motion to a fixed stop.