Parameterisation
The following parameters are relevant for homing to fixed stop:
Parameter ID | Parameter | Description |
|---|---|---|
getriebe[i].slope_type | Slope type | |
kenngr.homing_type | Homing type (TORQ) | |
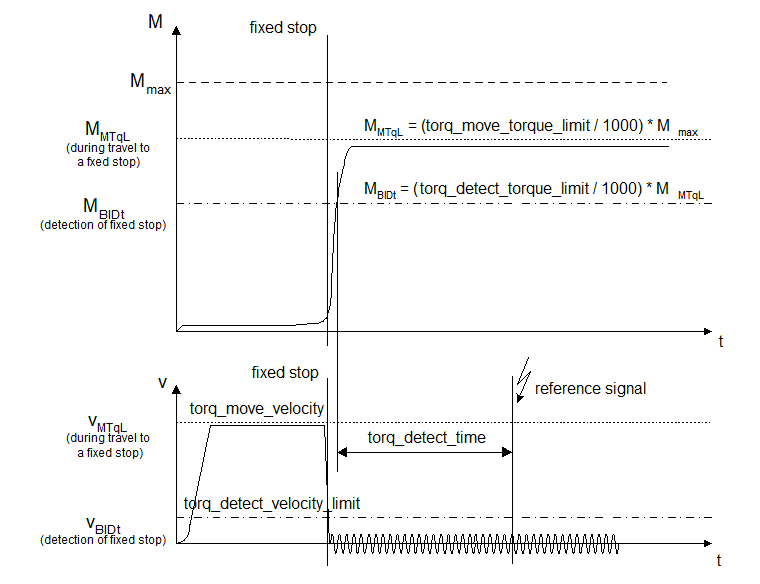
getriebe[i].homing.torq_move_velocity | Velocity during homing to a fixed stop | |
getriebe[i].homing.torq_move_acceleration | Acceleration during homing to a fixed stop | |
kenngr.homing.torq_min_distance | Minimum distance before detection of a fixed stop. | |
kenngr.homing.torq_max_distance | Maximum motion path during homing | |
kenngr.homing.torq_homing_dir | Direction of reference point travel | |
kenngr.homing.torq_detect_velocity_limit | Percentage residual velocity at which the fixed stop is considered detected. | |
kenngr.homing.torq_retraction_distance | Retraction distance after detection of the fixed stop | |
kenngr.homing.torq_homing_position | Position of the fixed axis | |
kenngr.homing.torq_detect_time | Minimum time to meet the detection criteria and detect a fixed stop. | |
kenngr.homing.torq_detect_pos_lag_limit | Position lag at which the fixed stop is considered detected. | |
kenngr.homing.torq_detect_torque_limit | Percentage torque at which the fixed stop is considered detected. |
The special detection criteria can be used singly or in any combination. However, at least one criteria must be used. If this is not the case, the following general detection parameters are used for fixed stop detection.
General detection parameters for fixed stop detecton.
Parameter ID | Parameter | Description |
|---|---|---|
antr.fixed_stop.detect.pos_lag_limit | Position lag at which the fixed stop is considered detected. | |
antr.fixed_stop.detect.detect_velocity_limit | Percentage residual velocity at which the fixed stop is considered detected. | |
antr.fixed_stop.detect.detect_torque_limit | Percentage torque at which the fixed stop is considered detected. |
If these criteria are also not parameterised, the criterion to detect the fixed stop is not used.